Autonoma Solar Robot steg 1

Hej, mitt namn är Ben Rawstron och detta är roboten har jag arbetat på, nyligen i min sophomore (tionde klass) året i gymnasiet. Jag skapade detta projekt som en "oberoende studie" på min lokala skola här i Waldoboro Maine eftersom jag ville överträffa begränsningarna av robotar som jag hade arbetat med tidigare. Jag har alltid varit intresserad av att skapa en robot som skulle springa runt söka och utforska oberoende av alla användare. Denna inspiration var drivet av det faktum att jag fick aldrig ett husdjur när jag var ung, så jag bestämde mig att göra min egen. Tidigare har jag gjort Lego Mindstorms robotar som var helt original i design. Den mest anmärkningsvärda Lego roboten var igen en autonom robot som jag skapade när jag var 11. Mekaniskt, kunde jag skapa en mycket imponerande och framgångsrika Lego-robot som någon, med ett öga för intrikata robust Lego mekanismer, skulle uppskatta. Nackdelen var programmeringskod tillsammans med några olika typer av sensorer finns tillgängliga som begränsade möjligheten för roboten.
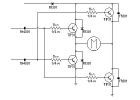
Därför byggde jag denna robot med målet att skapa en robot kan, arbeta obevakad (autonoma) och framför allt kan göra logiska beslut utifrån omgivningen medan att vara helt oberoende och laddar sig själv med solpaneler. Alla oss som är i robotics är bekanta med de robotar som kommer upp ett hinder och göra en skarp sväng vänster eller höger beroende på tröskel inställning av stationära sensorer ligger på de två främre hörnen. Dessa robotar är bra på studsande sig runt utan att komma i fysisk kontakt med objektet men de är ofta i en binda när inför objekt på båda sidor och misslyckas med att göra beräknade beslut som innebär färre problem efter beslutet att stänga ett visst sätt.
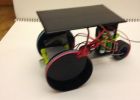
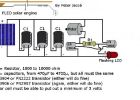
Dessutom begreppet en autonom robot är inte ny idé och robotar som flytta utan att operatören har blivit vanliga. Den andra delen som gör en robot fullt "autonoma" är dess självständighet som erövras mindre ofta och relaterar till strömkällan. Kraftkällan är ett stort problem som är svårt att adress eftersom en hållbar kraftkälla är ofta större än roboten själv. Solpaneler presentera en beprövad lösning till den mängd kraft som krävs men igen kräver mer utrymme än tillgängliga på ytan av roboten. Lösningen denna robot använder är ett utbyggbart (solceller) solcellsmodulerna liknar vad du skulle hitta på en lunar rover. Ovanför roboten har ram, som du ser för närvarande i bilder, ett dubbelt lager "umbrella" av solpaneler. Fyra solpaneler som är stationära är på topp i liggande format och 2 mer paneler på vardera sidan av roboten i stående form kommer att glida ut från under det översta lagret för sammanlagt 8 paneler. Roboten kommer att leta efter en källa av omgivande ljus och sedan mäta spektrumet med en färgsensor som garanterar ljuskällan kommer från solen (inte en lampa som inte skulle ge tillräckligt med ström) och sedan rita en väg mot ljuset i försök att debitera de 16 ampere av Li-Po batteriet.
Hur jag tänker använda laserskärare:
Jag har angett orkanen laser konkurrens av flera skäl. Först, jag delta i en liten stad skola med en mångsidig och kapabel elevkåren i regionen midcoast Maine USA som saknar många av de mer sofistikerade/användbart verktyg eftersom vårt distrikt inte har pengar för att stödja sådana kostnader. Följaktligen har detta en rännil ned påverkar till alla studenter som är inhiberad ha klasser som utforska avancerade träbearbetning, konsthantverk och tillverkning av ingående komponenter. Kostnad åt sidan, är min lärare mycket intresserade av etsning för både klassen shop och konst klasser. Individuellt, har jag en många användningsområden för laserskärare som sträcker sig från etsning, märkning och skära bitar för tillverkning för att skära bitar för att skapa modeller och full skala enheter. Några exakta exempel är, exakt märkning borra hål och längs linjerna på metall bitar för autonom robot baserad på datorn mönster, klippa ut och tillverka PCB (utskrivavet gå runt stiger ombord) och noggrant skära ut plast bitar av den expanderbara solcellspaneler nödvändigt att avsluta denna autonom robot. Solcellspaneler är gjord av plast bitar på grund av vikt oro och det är ytterst svårt att bygga intrikata bitar och sedan replikera dem med ett verktyg, exakt, samtidigt som en mekanism som fungerar fortfarande flytande. På det hela, hoppas jag att dela denna laserskärare med mina studiekamrater och ge dem möjlighet att utforska sina idéer med ett användbart verktyg genom att donera laserskärare till min skola. Jag hoppas du njuta av detta projekt och vänligen Visa mitt andra projekt på en Batteriindikator spänning.
(Obs: varsel uppdateringsfrekvensen för robotens sensorerna snabbar upp när roboten närmar sig ett objekt och hur den söker efter öppen plats snarare än "studsar" sin bana av närmast objektet.)
Mål: För att skapa en autonom robot som är helt oberoende, gör intelligent navigering beslut baserat på dess omgivningar och kan finna en källa av ljus som kan användas för att ladda sina batterier.

Autonoma solar driv tweeting fågelbordet

RC bil till autonoma Arduino Robot

RC bil Solar Robot makeover

Chefbot: En DIY autonoma mobil robot för att servera mat på Hotell

Autonoma Autonavigation Robot (Arduino)

Autonoma mobil Robot med ROS clumsybot

DIY Solar Robotic dubbla 55 Gallon kompostorn

Billig autonoma Humanoid Robot

Lätt Solar Robot nattlampan

Enkla solar robot
Solar robot

MANUELL / AUTONOM kontroll ROBOT (med SENSOR FUSION teknik)

Terra spindel: Autonoma sanering Robot

Autonoma brandman Robot

Spider Pig - autonoma hexapod robot
Hur man gör en mini solar robot!

Solar robotic beam robot
Hur man gör en solar robot!