PCB Quadrotor (borstlösa)



Jag hjälpte med en tidigare quadrotor bygga (här Instructable), och efter att ha flugit det jag bestämde mig att göra min egen. Jag hade en idé att göra en miniatyr en bestående av en enda kretskortet som är både dess strukturella ram och dess elektronik moderkort. Slutresultatet blev "4pcb", en micro quadrotor 138 gram. Jag utformade det i örn, lödda det och testat det under loppet av några månader. Här är några video av det flyger, efter en massa kontroll trim (se steg 13) och praxis:
Mer flygning video i det sista steget!
Idén att göra en PCB-baserade quadrotor är inte unikt (se länkar nedan för andra exempel), och 4pcb är definitivt inte den minsta (se Picopter Instructable för en riktigt liten en). Men jag tycker det slår en bra balans mellan storlek, kostnad, buildability och flyability. Det är också en av de enda PCB quadrotors med integrerad borstlös motor drivrutiner, så det finns ingen anledning att koppla upp externa ekonomiska och sociala råden. Och det går på XBee digital radio, så det finns ingen RC mottagare eller servo-stil ledningar.
4pcb specifikationer:
Storlek: 6,50"(165mm) motor center till mitten avstånd, diagonalt
Batteri: 3S (11.1V), 370mAh, 20-40 C litium Polymer
Motorer: HXM1400-2000 "hexTronik 5 gram borstlös Outrunner 2000kv"
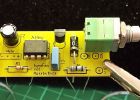
Råden: Toshiba TB6588FG "3-fas Full-Wave PWM drivrutin för Sensorlös DC-motorer"
Rekvisita: 4x2.5 (2), 4x2.5R (2)
Controller: Arduino Pro Mini 328 - 5V/16 MHz
IMU: Pololu MinIMU-9
Radio: XBee serie 1
Total vikt: 138g
Ytterligare nyttolast: < 30g
Flygtid 8min
4pcb är en "låg nivå" quadrotor bygger, med det menar jag att det finns mycket få svart låda komponenter. Den ram, motorstyrning, flygkontroll, radio gränssnitt och markstation UI utvecklas från komponent eller delmodul nivå. Beroende på din nivå av erfarenhet och intresse, kan du ta en annan strategi där du köpa kommersiella moduler för vissa delar och DIY andra. (Jag inkluderat länkar till vissa kit och moduler nedan.) Detta Instructable inkluderar alla filer och information som du skulle behöva bygga en helt från grunden.
Det finns några små förändringar jag skulle göra om jag gjorde en andra version av styrelsen, men överlag tror jag att det skulle kunna göra ett bra fristående projekt eller, ännu bättre, en bra utgångspunkt för egna ändringar! (6pcb hexrotor, någon?) Här är några resurser som kan vara användbara, oavsett om du bygger denna särskilda quadrotor eller en annan multirotor:
Andra Quadrotor Instructables:
quadrotor - anpassad ram med Arduino-baserad domänkontrollant.
RC Quadrotor helikopter - Off-the-shelf ram med egen controller.
Picopter - en mycket liten anpassade PCB quadrotor.
Multirotor ram Kit:
HobbyKing
ArduCopter
Multirotor Controller Kit:
HobbyKing (baserat på KK Multicontroller)
MultiWii
ArduPilot
OpenPilot CopterControl
Kompletta lösningar:
Parrot AR. Drone -mycket stabil iPhone-kontrollerade quad.
General Multirotor resurser:
RCGroups miniatyr Quadrotor tråd
DIY drönare Quadcopter Forum
OpenPilot Multirotor Forum
PID Tuning för Multirotor (OpenPilot TV)
Mini fyrhjuling (5" props)
TinyCopter (anpassade bygga)
BabyCopter (anpassade bygga)
Turnigy integrerat PCB mikro-Quad (KIT) (kommersiella)
Blade mQX (kommersiella)
Micro fyrhjulingar (4" props):
4pcb (anpassade bygga)
Kawaiicopter (anpassade bygga)
Nano fyrhjulingar (3" props):
Nanocopter (anpassade bygga)
Nano quadcopter wii (anpassade bygga)
Pico fyrhjulingar (2" props):
Walkera QR Ladybird (kommersiella)
CrazyCopter (anpassade bygga)
Picopter (anpassade bygga)
Chibicopter (anpassade bygga)
NC-ett (anpassade bygga)
Mina sidor:
4pcb och andra flygande saker
Balans Filter - sammanslagning av accelerometer och gyro signaler.

Nya och förbättrade borstlös Electric Scooter Power System Guide

En Wide Body Quadrotor - mönster och idéer för att bygga din egen.

RC Quadrotor helikopter

Ännu ett billigt Quadrotor - inskickad av BayLab för Instructables Sponsring programmet

Quadrotor
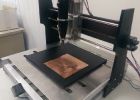
PCB isolering spår fräsning med MyDIYCNC Desktop CNC maskin

Avancerad borstlös Power Systems för små elektriska skotrar

Hur man gör en anpassad elektriska Go-Kart och borstlösa DC Motor

Göra en borstlös DC Motor

30seconds Nailpolish PCB

GENERADOR ELECTRICO CON fenor BORSTLÖS

Wearable PCB Guerilla valuta - den "gyllene bocken"
Hur man löda din fumeFan PCB KIT / några PCB KIT

Göra högkvalitativa PCB hemma själv

Arduino Stand - Alone PCB

Borstlösa Gimbal för Aerial Photography drönare

Konvertera en gammal RC bil till borstlös
Drone Gimbal bygga: HobbyKing "chock absorberande 2 Axis borstlös Gimbal Kit'
