Pitbook: En översikt över första Team 3181 Pittsford Panthers (3 / 8 steg)
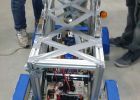
Steg 3: Minibot






Hur fungerar Minibot:
• Sällsynta jordartsmetaller magneter dra minibot till Polen och håll den medan det är att flytta. Det finns distanser mellan varje magnet, och de hålls i aluminium parentes.
• En hushåll strömbrytare vänder minibot på när den orange tråd och genomföringen bifogas den första skede dra det som låda diabilder förlänga.
• När minibot når toppen av stången, en gränslägesbrytaren stänger minibot. Magneterna hålla den innehas till Polen.
• På gränslägesbrytaren är en bit av gummi som orsakar växeln som utlöses när tillräcklig kraft uppnås (ca 5 N). Denna kraft är nödvändiga för att nå målet och få poäng. Gränslägesbrytaren är DPDT och kan kopplas in i en mängd olika sätt att ge olika resultat.
Hur distribution systemet fungerar:
• Distribution systemet består av två parallella, tre steg låda diabilder. De är anslutna med en hakparentes i ryggen, som roboten är monterad på en konsol kopplad till hissen. Systemets distribution är på en punkt, så det kan upp till Polen. Låda diabilder vila på en aluminium stöd på baksidan av robotens ram.
• En aluminium propp används för att hålla tillbaka PVC "v" systemet och hålla distribution systemet från att gå alltför långt sida till sida. Proppen är ansluten till fästet bak i roboten. Den har två stycken av skurna pneumatiska slangar att förhindra skador på låda diabilder och PVC "v."
• På den tredje etappen av låda bilderna, två fästen är monterade i slutet. Korgen sitter på dessa konsoler. De kopplas av en 1/4-20 bult och en #6 bult på varje sida. Blå PVC distanser behöver separera plattformen från fästena.
• På plattformen, det finns en fjäderbelastad knapp. Detta håller minibot på plats under matchen. Knappen använder en 1/16 hex för att ta av om behövs, men var försiktig på våren; knappen kunde flyga iväg. Knappen är ansluten till en gängstång som sitter inne i ett aluminiumrör. Detta förbinds med två skruvar till botten av plattformen som finns i aluminium fästet. Detta ger stöd för knappen systemet. På baksidan av knappen har en aluminium pjäs som håller två kort plastskruvar som har aluminium röret runt dem. Dessa hålla minibot på plats under matchen.
• Hela systemet körs på pneumatik. En 4 tums cylinder är kopplad direkt till fästet bak i distribution systemet. Det är också kopplad till två bitar av polykarbonat cell, som kan glida fritt ned i lådan bilderna. En 16 tums cylinder är kopplad till den övre delen av polykarbonat cellen via industriella zip band och klibbig pad. Detta möjliggör en fullständig 20 inches av förlängning.
• Båda ändar av både 4" och 16" rör har variabelt tryck beslag att styra flödet. Tillförsel av båda rören är anslutna med ett T rör och dryckestråg till magnetventil längst till vänster på baksidan av roboten. Ändarna utdata är anslutna med ett T rör och dryckestråg till magnetventil längst till vänster. (Felsökning Obs: om distribution systemet inte är skjuter korrekt, prova att byta VVS av rören i magnetventil, vända indata och utdata)
• Fäst på insidan av den första etappen av låda bilden är en orange med en genomföring på slutet. Detta används för att aktivera minibot när lådan bilderna förlänga.
Före Match Checklista:
1. dra dra bilder ut något och flip PVC "v" i bakom propp (måste göras innan kompressor)
2. förlägga Minibot försiktigt på distribution system plattform. Detta görs genom att först trycka och hålla i den fjäderbelastade knappen och sedan placera flikarna på minibot genom de större platser. Släpp knappen och se till att skruvarna gick genom hålen i fliken.
3. Placera tråden och genomföring som är kopplad till rita bilder runt hushåll strömbrytaren. Vara säker strömbrytaren är i läge off.
4. Kontrollera vita gränslägesbrytaren på toppen av Minibot. Det bör ha en svart bit av gummi runt växeln och växeln bör dras hela vägen upp.
5. se till att hela systemet är inom den ramen omkretsen

FPV markstationer - enkel guide och en grundläggande översikt över min GS bygga
Översikt över billig oscilloskop Kit

En snabb översikt över mekaniska fördelen med utväxling

Översikt över Arduino 101
Hur man ställer in Raid på Mac. Översikt över RAID-typer. Mac OS X Yosemite

Hur man startar en första Robotics Team

Värd för första gången träffa & hälsar

MakeyMakey tangentbord Emulator för första Robotics
Scarlett Robotics första, F.I.R.S.T Robot :)

FÖRSTA mentorskap: Volontärarbete med effekt
Team Gertee Rider som vind

Att göra kretskort på eller nära hem: en omfattande översikt, nästan en Guide
Bevattning din trädgård med en opamp: krets, lista över material

SLAYER MAGNETISERINGSMASKINER & TESLA SPOLAR allt du behöver veta för att komma igång!

LEGO pussel låda nr 1 "Första" (och andra lådor!)

Utöver StandardFirmata - lägger till stöd för nya

Konkurrens beredskap för första lag

Hur man #MakeItLoud för första
