Robot Controlado Por Bluetooth (2 / 3 steg)
Steg 2: Conexiones





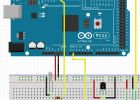
En esta parte conectaremos los pines del puente h y el modulo bluetooth al arduino
ingen tiene que ser exactamente en los mismos pines sv los que los conecto yo, esto puede variar segun el arduino que utilicen o en los que ustedes quieran.
En este caso el diagrama muestra FN använda Arduino MEGA pero en realidad FN Arduino UNO y por eso los pines cambian.
Puente H:
PA = inestable del puente H = stift 3 asegúrense de conectarlo en un Pin analógico PWM ~
A1 = Direccion 1 del puente H = stift 4
A2 = Direccion 2 del puente H = stift 5
PB = inestable del puente H = stift 6 asegúrense de conectarlo en un Pin analógico PWM ~
B1 = Direccion 1 del puente H = stift 7
B2 = Direccion 2 del puente H = stift 8
En el modulo Bluetooth el RX se conecta al TX del arduino y el Tx al Rx del arduino. Pines 0 y 1 del arduino UNO.
Los fenor los conecte sv paralelo para poder controlar con una salida del puente H 2 fenor, asegúrense de conectarlos con la misma polaridad rojo con rojo y neger con neger, por que si los conectan al reves giraran sv sentidos opuestos.
En este caso hice una plaquita para montarla utgående al arduino y así evitarme los problemas de que se gjuta FN kabel o el típico kabel sv falso.

Tanque de guerra controlado por bluetooth

Robot Controlado Por Wifi Con detektor De Intensidad De Señal

Carro Controlado por Bluetooth

Tanque Oruga con video, controlado por android (app inventor) mediante bluetooth

Grundläggande tank-drive robot kontroll över Bluetooth med mbed med Freescale K64F

Robot Attiny2313 med Bluetooth HC06 och stegmotorer

Mobil robot kontrollerad med bluetooth

Raspberry Pi Robot kontrollerad via Bluetooth

Robot controlado con cualquier styra de Tv
Ar Condicionado controlado por Arduino, via infravermelho e com medição de temperatura.

Conectar Android con Arduino por Bluetooth Capitulo 1

Spåras Robot Bluetooth kontrolleras av Arduino Via Android ansökan

Bluetooth kontrollerad robot med Trådlös Spionkamera

Robot Educativo Fischertechnik Arduino (RAFA)

Robotic Arm(Inmoov) med Cortex M3 (brasilianska öppen hårdvara)

Chassis de Robot con Orugas Impresas sv 3D

Väckarklocka med IR- och Bluetooth-högtalare
Tanken med video kontrolleras av app inventor android och bluetooth
