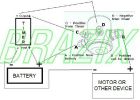
Universal Gripper - spruta drivs

"Universal griparen" utvecklats av forskare från Cornell University, University of Chicago, och iRobot inspirerade mig att skapa min egen version. YouTube-video är ganska imponerande. Gripdon kan bilda runt mycket asymmetrisk och smidig former och fortfarande plocka upp objektet.
Jag samlade material nedan och beslutade att skapa en gripare av min egen som skulle kunna införlivas i en av min robot mönster. Lägga till en vakuumpump eller en kraftfull luft mover verkade svårt och förmodligen onödigt. Så började jag tänka på dammsugare.
Jag minns att när de filmade "En amerikansk varulv i London" används som Rick Baker injektionssprutor ansluten i en linje. När en riktigt stor spruta har komprimerats i slutet av raden, små dök upp att skapa utseendet på en ryggraden utbrott under huden av varelsens tillbaka.
Jag bestämde mig för att samma idé kan arbeta med "universal griparen."
Jag trodde dessutom att med hjälp av en tratt kunde fungera fint för ballong stöd. Lekte med det, trodde jag att lägga till en tryckgivare i tratten skulle tillåta Arduino att tillämpa sug när ballongen kom i kontakt med objektet för att plocka upp. Detta leder mig till Plusea och hennes instructables med hjälp av velostat och flexibla material.
Otroligt, verkar allt fungera. Följ dessa steg för att se hur jag gjorde det. Du kan förmodligen se förändringar som skulle förbättra designen.

DIY universell Robot Gripper

Att göra en egen i örat övervaka

Hydrokultur pumpen från återvunnet batteri drivs ogräs killer spruta

Universal högeffekts LED Driver - firmwareuppdatering
Universal High-Power LED Driver med 3D-printable fall

3D tryckt spruta Pump Rack

10W LED driver och dimmer

En Universal RFID nyckel

5 minut spruta penna
HEMGJORT automatisk boskap spruta för FLUGKONTROLL

Montera en Universal PCB

EL Wire hatt: Sekvenserade och ljud aktiverat med fjärrkontroll - drivs med Arduino och Sparkfun

Solar Driv Remote temperaturgivare

Att göra en prisvärd, inställd digital, universal köldmedium grenrör gauge!

Steven Universe lumi inkodye underkläder med kristall pärla granat
Hur till installera en Linux OS i din USB blixt driva och förvandla det till en bärbar App Suite

Installera ett operativsystem från en blixt driva

Universal Analog hårdvara testbänken
