4 servo drive CellBot som kan fjärrstyras. (8 / 8 steg)
Steg 8: Arduino koden anpassade till min användning.
Cellbots kodbas omskriven.#include < Servo.h >
#include < EEPROM.h >
Servo myservoFR;
Servo myservoFL;
Servo myservoRR;
Servo myservoRL;
Servo myservoHead;
#define BUFFERSIZE 20
#define InferFPin 0 //Front sluta sig till analoga givarstaven
#define InferBPin 1 //Back sluta sig till analoga givarstaven
#define SonarPin 2 //sonar analog pin
#define LeftEarPin 3 //left öra analoga pin
#define RightEarPin 4 //right öra analoga pin /
#define VoltPin 5 //analog pin 5 används för VoltageCheck upptäckt.
#define LEDBlue 5
#define LEDGreen 6
#define LEDRed 7
#define servoPinHead 8 / / Servo kontrollera vinkeln på telefonen
#define FLpin 9
#define FRpin 10
#define RLpin 11
#define RRpin 12
#define ledPin 13 / / tänds när du kör servon
#define regulator 20
#define OneDeg 5,65 //setting roterande fördröjning för motsvarar en grad (2 rullar mattan)
#define OneDeg 9.04 //setting roterande fördröjning för motsvarar en grad (2 hjul lövträ)
Kontrollera batteriets spänning visade sig vara det svåraste som jag försökt. Med både batteri och USB-ansluten...
ger olika mätvärden sedan bara batteriet anslutet. I själva verket var de analoga avläsningarna omvända på något sätt.
#define shutdownVoltageCheck 978 / / detta nummer är unikt för varje spänningsavdelare och batteri combo. Det är i grunden 20% till mig.
#define analogvoltconstant 144.6969
int iAnVal; sonar sensor input
int deg;
int InferF = 0;
int InferB = 0;
int soundRT [72].
int soundLF [72].
int avstånd [72].
int tempvolt;
osignerade långa BatteryIndex = 0;
osignerade långa BatteryIndexThreshold = 150000; ca 10 minuter.
osignerade långa RegulatorIndex;
osignerade långa RegulatorTimerThreshold = 150000; intervallet slå på eller stänga av spänningsregulatorn. ca 10 minuter.
int VoltSampleSize = 1000;
char dir ='s'; Zeros riktning bot har fått höra att driva - framåt, bakåt, höger, vänster, stoppa, anger att den stannar.
int power =-1;
booleska ConservePower = sant; Detta avgör om bot använder makten räddningen sätt.
int warmup = 1000; dröjsmål att starta installationsprogrammet i millisekunder.
Ingen config krävs för dessa parametrar
booleska servosActive = false; anta servon inte rör sig när vi börjar
osignerade långa stopRegulatorIndex=millis(); används för att beräkna den köra RegulatorIndex för servon
char incomingByte; Innehar inkommande serievärden
char msg [8]. För att skicka tillbaka seriell meddelanden
char inBytes [BUFFERSIZE]; Buffert för följetong i meddelanden
int serialIndex = 0;
int serialAvail = 0;
** UTBUD att hitta ***-inställningar gäller för ultraljud utbud finders. OK att lave som-om du inte har dem på din robot
långa dist, mikrosekunder, cm, inches; Används av range finder för att beräkna avstånd
CONST int rangePinForward = 2; Digital pin för framåt inför range finder (för objektet avstånd framför bot)
CONST int rangeToObjectMargin = 25; (bot slutar när avstånd närmare än denna - satt till 0 om ingen sensor)
CONST int rangePinForwardGround = 0; Digital pin för nedåt inför avståndsmätare på framsidan (för kanten av bordet upptäckt)
CONST int rangeToGroundMargin = 0; Varierar i cm till tabellen (bot kommer sluta när avståndet är större än denna satt till 0 om ingen sensor)
CONST int rangeSampleCount = 3; Antal intervall avläsningar ta och för ett mer stabilt värde
//=============================================================================
void setup() {
Serial.println ("startar du installationsprogrammet!");
Delay(WarmUp);
Ställ in input/output mode ***
pinMode (LEDBlue, OUTPUT);
pinMode (LEDGreen, OUTPUT);
pinMode (LEDRed, OUTPUT);
pinMode (servoPinHead, produktionen);
pinMode(FLpin,OUTPUT);
pinMode(FRpin,OUTPUT);
pinMode(RLpin,OUTPUT);
pinMode(RRpin,OUTPUT);
pinMode (ledPin, produktionen);
pinMode (regulator, produktionen);
digitalWrite(servoPinHead,0);
Serial.BEGIN(9600);
Serial3.BEGIN(115200);
lastNeckValue = readSetting (EEPROM_lastNeckValue, lastNeckValue);
om (lastNeckValue! = DEFAULT_lastNeckValue) {
myservoHead.attach(servoPinHead);
myservoHead.write(lastNeckValue);
// }
//***************************** Clear Sensor Map ************************
för (deg = 0; deg < 72; deg = deg + 1) {
soundRT [GRD] = 0;
soundLF [GRD] = 0;
avståndet [GRD] = 0;
}
standard till servon avstängd ***
myservoFR.detach();
myservoFL.detach();
myservoRR.detach();
myservoRL.detach();
LEDOff();
pinMode (regulator, produktionen); inställd på stift 20 Utläge så VoltageCheck regulator kan slås på och av.
digitalWrite (regulator, låg); Starta VoltageCheck regulator i läge off.
Serial.println ("avsluta installationsprogrammet!");
}
//====================================================================================
Svar ut över följetong och hanterar pausa och spola data att hantera Android seriell kommunikation
void serialReply (char * sensorname, char * tmpmsg) {
Serial3.Print(sensorname);
Serial3.Print(":");
Serial3.println(tmpmsg); Skicka meddelandet tillbaka ut den seriella linjen
Vänta för seriell felsökaren att hålla käften
Delay(200); Detta är ett magiskt nummer
Serial3.flush(); rensar alla inkommande data
}
Kontrollera om tillräckligt RegulatorIndex har förflutit för att stoppa bot och om det är säkert att gå vidare
booleska checkIfStopBot() {
int tempfrontsonar = Averagefive(SonarPin);
Serial.Print ("front ekolod:");
Serial.println(tempfrontsonar);
int tempfrontinfer = Averagefive(InferFPin);
Serial.Print ("front dra slutsatsen:");
Serial.println(tempfrontinfer);
int tempbackinfer = Averagefive(InferBPin);
Serial.Print ("back dra slutsatsen:");
Serial.println(tempbackinfer);
Serial.println();
om ((dir == "f") & & ((tempfrontsonar < rangeToObjectMargin) || (tempfrontinfer < 200))) {
Stop();
servosActive = false;
return true;
} else om (dir == 'b') {
om (! () (tempbackinfer < 650) & & (tempbackinfer > 450))) {
Stop();
servosActive = false;
return true;
}
}
returnera false;
}
Skicka kommando till anslutna Bluetooth enheten att initiera ihopkopplingen
void pairBluetooth() {
Serial3.Print("\r\n+INQ=1\r\n"); Detta är för Seeedstudio master/slav enhet (förändring som behövs för din modell)
}
Läser seriell in om tillgängliga och tolkar kommandot när full kommandot skickades.
void readSerialInput() {
serialAvail = Serial3.available();
Läsa vad som finns
för (int jag = 0; jag < serialAvail; i ++) {
Lagra i buffert.
inBytes [jag + serialIndex] = Serial3.read();
Kontrollera om kommandot slutet.
om (inBytes [jag + serialIndex] == '\n' || inBytes [jag + serialIndex] == ';' || inBytes [jag + serialIndex] == ' >') {//Use; när du använder Serial Monitor
inBytes [jag + serialIndex] = '\0'; slutet av strängen röding
parseCommand(inBytes);
serialIndex = 0;
}
annat {
förväntar sig mer av kommandot att komma senare.
serialIndex += serialAvail;
}
}
}
Rengör och tolkar kommandot
void parseCommand(char* com) {
om (com [0] == '\0') {return;} //bit av felkontroll
int start = 0;
får start av kommandot
medan (com [start]! = ' <') {
börja ++;
om (com [start] == '\0') {
sitt inte där. Måste vara gammal version
Start = -1;
bryta;
}
}
börja ++;
Flytta till början
int jag = 0;
medan (com [i + start - 1]! = '\0') {
com [i] = com [start + i];
i ++;
}
performCommand(com);
}
void LEDWhite() {
digitalWrite (7, låg).
digitalWrite (6, låg).
digitalWrite (5, låg).
}
void LEDOff() {
digitalWrite (7, hög).
digitalWrite (6, hög).
digitalWrite 5, hög,
}
void Detach() {
Serial.println ("ta bort servon!");
myservoFR.detach();
myservoFL.detach();
myservoRR.detach();
myservoRL.detach();
Delay(150);
}
void Attach() {
Serial.println ("bifoga servon!");
myservoFR.attach(FRpin);
myservoFL.attach(FLpin);
myservoRR.attach(RRpin);
myservoRL.attach(RLpin);
digitalWrite (regulator, hög);
}
void Forew() {
Serial.println ("*** framåt!");
dir = "f";
om (inte checkIfStopBot()) {
Attach();
myservoFR.write(180);
myservoFL.write(0);
myservoRR.write(180);
myservoRL.write(0);
RegulatorIndex = 0;
servosActive = sant;
}
}
utan laga kraft bakåt () {
int Tempdist = Averagefive(InferFPin);
Serial.Print ("bakåt avstånd:");
Serial.println(Tempdist);
Serial.println();
dir = "b";
om (inte checkIfStopBot()) {
Serial.println ("*** bakåt!");
Attach();
myservoFR.write(0);
myservoFL.write(180);
myservoRR.write(0);
myservoRL.write(180);
RegulatorIndex = 0;
servosActive = sant;
}
}
void Stop () {
Serial.println ("*** Stop!");
myservoFR.detach();
myservoFL.detach();
myservoRR.detach();
myservoRL.detach();
dir ='s ";
RegulatorIndex = 0;
serialReply ("i", "st"); Berätta för den telefon som roboten stannade ###
servosActive = false;
}
tomrummet () {
Serial.println ("*** rotera vänster!");
Attach();
myservoFR.write(180);
myservoFL.write(180);
myservoRR.write(180);
myservoRL.write(180);
dir = 'l';
RegulatorIndex = 0;
servosActive = sant;
}
void rätt () {
Serial.println ("*** rotera höger!");
Attach();
myservoFR.write(0);
myservoFL.write(0);
myservoRR.write(0);
myservoRL.write(0);
dir = "r";
RegulatorIndex = 0;
servosActive = sant;
}
void CircleRt () {
Serial.println ("*** cirkeln rätt!");
Attach();
myservoFR.write(95);
myservoFL.write(0);
myservoRR.write(95);
myservoRL.write(0);
RegulatorIndex = 0;
}
void CircleLf () {
Serial.println ("*** cirkel vänster!");
Attach();
myservoFR.write(180);
myservoFL.write(85);
myservoRR.write(180);
myservoRL.write(85);
RegulatorIndex = 0;
}
void mydelay (int grader) {
Serial.println ("mydelay start");
fördröjning (int(OneDeg * degress));
Serial.println ("mydelay slutet").
}
int Averagefive (int listenpin) {
int genomsnitt = 12.
int lyssna [genomsnittliga];
int index1;
int highindex = 0;
int hög = 0;
int lowindex = 0;
int låg = 1000;
int totala = 0;
för (index1 = 0; index1 < genomsnittet; index1 = index1 + 1) {
lyssna på [index1] = analogRead(listenpin);
Serial.println(listen[index1]);
}
för (index1 = 0; index1 < genomsnittet; index1 = index1 + 1) {
om (lyssna [index1] > hög) {
hög = lyssna [index1];
highindex = index1;
}
}
för (index1 = 0; index1 < genomsnittet; index1 = index1 + 1) {
om (lyssna [index1] < låg) {
låg = lyssna [index1];
lowindex = index1;
}
}
för (index1 = 0; index1 < genomsnittet; index1 = index1 + 1) {
om ((index1! = highindex) & & (index1! = lowindex)) {
totalt = totalt + lyssna [index1];
}
}
Total = int (totalt / (genomsnitt-2));
Serial.Print ("genomsnittliga:");
Serial.println(total);
avkastning totalt;
}
void Listen() {
Serial.println ("=== lyssna ===!");
för (deg = 0; deg < 71; deg = deg + 1) {
soundRT [GRD] = Averagefive(RightEarPin); lyssna på höger öra och tilldela värde till matris
soundLF [GRD] = Averagefive(LeftEarPin); lyssna på vänster öra och tilldela värde till matris
avståndet [GRD] = Averagefive(SonarPin); läsa ett värde från sensorn
Serial.println(Distance[deg]); Visa värde skrivs till sträcka arrayen för denna riktning
Right();
mydelay(5);
Stop();
}
Stop();
}
void Course() {
int BestDistDeg = 0;
int BestDist = 0;
för (deg = 0; deg < 71; deg = deg + 1) {
soundRT [GRD] = analogRead(RightEarPin); lyssna på höger öra och tilldela värde till matris
soundLF [GRD] = analogRead(LeftEarPin); lyssna på vänster öra och tilldela värde till matris
om (avstånd [deg + 1] > distance[BestDistDeg]) {
BestDistDeg = deg + 1.
}
Serial.Print("BestDist=");
Serial.println(Distance[BestDistDeg]);
Serial.println(BestDistDeg); Visa värde skrivs till sträcka arrayen för denna riktning
}
Left();
mydelay((71-BestDistDeg) * 5); Rotera höger tills kursen på längsta avståndet uppnås.
Stop();
Forew();
}
void ForewardBackward() {
Serial.println ("*** frammåt bakåt test Start!");
Forew();
Delay(2000);
Stop();
Delay(2000);
Backw();
Delay(2000);
Stop();
Delay(2000);
Serial.println ("*** frammåt bakåt test slutet!");
}
void base() {
myservoFR.detach();
myservoFL.detach();
myservoRR.detach();
myservoRL.detach();
Delay(2500);
myservoFR.attach(FRpin);
myservoFL.attach(FLpin);
myservoRR.attach(RRpin);
myservoRL.attach(RLpin);
Serial.println ("Skicka 110');
myservoFR.write(180);
myservoFL.write(0);
myservoRR.write(180);
myservoRL.write(0);
Delay(2500);
myservoFR.detach();
myservoFL.detach();
myservoRR.detach();
myservoRL.detach();
Delay(2500);
myservoFR.attach(FRpin);
myservoFL.attach(FLpin);
myservoRR.attach(RRpin);
myservoRL.attach(RLpin);
Serial.println('sending70');
myservoFR.write(0);
myservoFL.write(180);
myservoRR.write(0);
myservoRL.write(180);
Delay(2500);
}
void degreetest() {
Serial.println ("degreetest start");
Stop();
Delay(5000);
Right();
mydelay(360);
Serial.println ("degreetest slutet").
}
void Signalblink() {
LEDWhite();
Delay(500);
LEDOff();
Delay(500);
}
void forwardinfertest() {
Delay(500);
Serial.Print ("framåt infered senor:");
Serial.println(analogRead(InferFPin));
tröskelvärde för fara < 200
}
void backwardinfertest() {
Delay(500);
Serial.Print ("bakåt infered senor:");
Serial.println(analogRead(InferBPin));
tröskelvärde för fara < 300
}
void sonartest() {
Delay(500);
Serial.Print ("ekolod senor:");
Serial.println(analogRead(SonarPin));
tröskelvärde för fara < 30
}
int VoltageCheck() {
int index1 = 0;
Double voltsum = 0;
int analogvolt = 0;
för (index1 = 0; index1 < VoltSampleSize; index1 = index1 + 1) {
voltsum = voltsum + analogRead(VoltPin);
}
analogvolt = int (voltsum / VoltSampleSize);
Serial.Print ("VoltageCheck:");
Serial.Print ("analag volt:");
Serial.println(analogvolt);
Serial.Print ("faktiska volt:");
Serial.println ((analogvolt / analogvoltconstant));
Serial.println();
återvända analogvolt;
}
void BatteryCheckLED()
{
om (VoltageCheck() > shutdownVoltageCheck) {
digitalWrite (LEDRed, låg);
digitalWrite (LEDGreen, hög);
} annat {
digitalWrite (LEDRed, hög);
digitalWrite (LEDGreen, låg);
}
BatteryIndex = 0;
}
void RegulatorControlToggle()
{
Power = kraft * -1;
om (power == 1) {
digitalWrite (regulator, hög);
}
om (power == -1) {
digitalWrite (regulator, låg);
}
RegulatorIndex = 0;
}
void Miser()
{
RegulatorIndex = RegulatorIndex + 1.
om (RegulatorIndex == RegulatorTimerThreshold) RegulatorControlToggle();
}
//********************************************* end mine *******************************************
void performCommand(char* com) {
float volt = 0;
om (strcmp (com, "f") == 0) {/ / framåt
Forew();
} else om (strcmp (com, "r") == 0) {/ / höger
Right();
} else om (strcmp (com, "l") == 0) {/ / vänster
Left();
} else om (strcmp (com, "b") == 0) {/ / bakåt
Backw();
} else om (strcmp (com, "s") == 0) {/ / stopp
Stop();
} else om (strcmp (com, "fr") == 0 || strcmp (com, "fz") == 0 || strcmp (com, "x") == 0) {/ / print framåtvänd avstånd sensor
dist = Averagefive(SonarPin);
itoa (dist, msg, 10); Förvandla de förd int till en char
serialReply ("x", msg); Skicka avståndet ut den seriella linjen
} else om (strcmp (com, "z") == 0) {/ / Läs och skriv ut marken mot avstånd sensor
dist = Averagefive(SonarPin); dist = getDistanceSensor(rangePinForwardGround);
itoa (dist, msg, 10); Förvandla de förd int till en char
serialReply ("z", msg); Skicka avståndet ut den seriella linjen
Serial.println(dist);
} else om (strcmp (com, "v") == 0) {/ / läsa och skriva ut VoltageCheck
volt = VoltageCheck();
itoa (volt, msg, 10); Förvandla volt int till en char
Serial.println(volt);
serialReply ("v", msg); Skicka avståndet ut den seriella linjen
} else om (strcmp (com, "h") == 0) {/ / hjälp-läge - felsökning växla
Signalblink();
} else om (com [0] == 'n') {/ / flytta huvudet
sscanf (com, n %d", och lastNeckValue); Tolka indata till flera värden
myservoHead.attach(servoPinHead);
myservoHead.write(lastNeckValue);
EEPROM.write (EEPROM_lastNeckValue, lastNeckValue);
om (felsökning) {
Serial.Print ("halsen flyttade till");
Serial.println(lastNeckValue);
//}
} else om (com [0] == "p") {/ / initierar Bluetooth para ihop så en annan enhet kan ansluta
pairBluetooth();
} annat {
serialReply ("e", com); / / Echo Okänt kommando tillbaka
om (felsökning) {
Serial.Print ("Okänt kommando:");
Serial.println(com);
// }
0-9, w, n, w, jag, c, h, d för demo,
}
}
=== Huvudloop som kör på alla RegulatorIndexs ===
void loop()
{
readSerialInput();
checkIfStopBot();
BatteryIndex = BatteryIndex + 1.
om (BatteryIndex == BatteryIndexThreshold) BatteryCheckLED();
om (ConservePower) Miser();
}
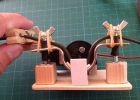
Servo drivs peristaltiska pumpen styrs av Arduino

Liten footprint Arduino Nano med USB-laddning krets (Li-Ion eller LIPO) som kan stänga av sig själv (mjuk spärren power)

En vattning controller som kan användas i hem nätverk

LDRs + Arduino = en enkel robot som kan känna av ljuset!

3 tekniska prylar som kan förbättra din hälsa

3 enkla hemmagjorda verktyg som kan vara mycket användbar

Gör din egen IR-fjärr som kan nå någonstans
Cool hacks life som kan förändra ditt liv

Min 1€ antispionprogram som kan slå miljarder dollar statsunderstödd malware

Bygga en krets som kan ändra färg på en LED med ljudet släpps ut ur en MP3-spelare.

Hur man gör en iphone/android/web kontrollerbar förlängningssladd som kan användas för att styra din crockpot, garageport, kaffebryggare, riskokare, smoothie mixer... fisk tank bubbelflaskan eller någon annan elektronisk enhet från var som helst med tillg

Magic Wand som kan förvandla bruksföremål på och av

Två kemikalier som kan förstöra ditt liv EXTRA: Hur att hålla ett friskare hem!

TRÅDLÖS DÖRRKLOCKA som kan rädda ett liv

.25 ultra slim minimalistisk plånbok, Sedelklämma, metall flasköppnare, kreditkort som kan kopplas till ditt android fall

Förvandla Raspberry Pi till en Bluetooth-enhet som kan upptäckas av fjärranslutna bluetooth klient

Hur man gör en Mockingjay Pin: som kan ses på Hunger Games

Göra en enkel spela topp från strach som kan styras manuellt
