Attiny85 som steg/Dir Stepper Motor Controller (4 / 8 steg)
Steg 4: Gå runt



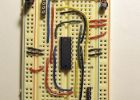
Detta är kretsen.
Vi använder Attiny på standard, insidan-klocka frekvens, utan externa crystal. Med hjälp av stift 6, 7, 2, 3 för Stepper motor trådarna. Varje sida av chip används för en spole. En stegmotor har 2 spolar inuti den, båda ändarna av dem båda är dess ledningar.
För unipolär motorer
Alla 4 av dem måste gå till en matris av transistorer. TIP120 är en bra idé, eller en ULN2003 som innehåller 7 Darlington transistorer (som TIP120) kan 500mA varje. Det är en gemensam krets och du hittar den lätt. Jag har lagt en. A, b, c, d gå till 6,7,2,3. Använda vissa "trial and error" för anslutning beställa.
För bipolär motorer
Alla 4 trådar gå till 2 H-broar. Du hittar Internet-anslutningsdelning som innehåller enkla eller dubbla H-broar för 2-3 euro (som kan driva upp till 1-2 ampere). 1a1b, 2a, 2b är signalerna att ansluta till den Attiny 6,7,2,3 i detta fall... Igen, prova är din vän... Var försiktig eftersom h-överbryggar tenderar att värma snabbt om de få anslutna på fel sätt...
Signalen steg läses i stift 7. Mikrokontroller är programmerad på ett sätt som att det kommer att utlösa en kombination förändring varje gång det realiserar det stiftet 7 gick från låg till hög.
Aaand... Dir signalen... Den använder Återställ PIN-koden. Nej jag har aldrig bråkade med säkringarna och jag har inte för avsikt också... Det finns en rad någonstans i Attiny85 databladet som förklarar att mikrokontroller återställs om pin RESET går under 0.9V. Detta är tekniskt en låg signal. Men vad händer om spänningen är lägre än 5V (utan tvekan hög signal) men mer än 0.9V?
Hemligheter av förarlösa Stepper Motor drift

Intellekten Edison: Ställa in Stepper Motor

Ställa in en Stepper Motor Driver

Trä Gear Clock med Stepper Motor Drive

Hur man använder en Stepper Motor

Designa en 3D tryckt pärlstav ball chain remskivan för Stepper Motor NEMA 17 på TinkerCAD

Kontroll DC och stepper motors med L298N Controller moduler med dubbla motorer och Arduino

Stepper Motor Easy Driver

Bipolära Stepper Motor

Stepper Motor grunderna - 6 kablar unipolär / bipolär Motor

Stepper Motor grunderna - 5 kablar unipolär / bipolär Motor

Enkla Stepper Motor Driver för Arduino CNC projekt

Stepper Motor grunderna - 4 trådar bipolär Motor
Stepper Motor modul

QuickStart - en transistor DC motor controller

Göra en 8-amp Dual Motor Controller för $40

Arduino moduler - L298N dubbla H-Bridge Motor Controller

Arduino Stepper Motors