Carro Controlado por Bluetooth (3 / 4 steg)
Steg 3: CODIGO sv MICROCONTROLADOR
El código comienza declarando los pines que vamos en utilizar sv el microcontrolador y dos variabel que van en especificar el intervalo tiempo que queremos que se envie la informacion al puerto följetong.
Aclaramos que estamos utilizando el Arduino UNO Bootloader como compilador, así que el código se programa sv sv Arduino IDE y los pines se nombrarian como se Haría sv el Arduino UNO.
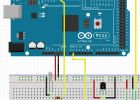
Cada pin debe especificarse como una salida '' utgång '', estos son los que enviaran el voltaje lógico para controlar los fenor mediante el H-bryggan. Solamente el '' echoPin'' ' se especifica como un entrada '' INPUT'', pues es el que recoge la señal ultrasónica. Se comienza la comunicación följetong en 9600 bps.
Ahora procedemos en programar las funciones que nos permiten controlar el Carro. Cada función le establece un nivel de voltaje en cada pin mediante '' ANALOGWRITE''. Este comando återvi PWM que es una función del microcontrolador que permite la variación de voltaje al ajustar el tiempo sv el que se enciende y apaga el stift sv cuestión, así el voltaje promedio que se örutom a la salida es proporcional a la anchura del pulso de oscilación que controlamos mediante un mod entre 0 y 255. De esa manera somos capaces de controlar la velocidad de cada uno los fenor DC.
En continuación declaramos una funcion "performCommand" que va en leer el Puerto seriell del Microcontrolador y va en actuar conforme en lo que recoja o lea sv el. La logica va asi:
SI el Puerto seriell está activo, entonces guardar sv la variabel '' val'' lo que sea que este alli; SI la variabel es igual en f, entonces ejecutar funcion go_foward sino entonces, si la variabel es igual ett b, entonces ejecutar funcion go_reverse sino entonces... etc
La funcion '' medition'' realiza la medición de distancia. Primero declaramos las variabler de duración y distancia. Encendemos el '' trigPin'' durante 10 microsegundos, este envía un pulso de sonido en través del espacio. Luego varaktighet va en ser igual al tiempo que tarda el pulso de sonido en regresar en '' echoPin''. CON esa información ahora podemos calcular la distancia sv centímetros valiéndonos de la velocidad del sonido y lo almacenamos en la variabel distancia. Dicha variabel es enviada al Puerto följetong cada segundo.
La función '' VOID LOOP'' permite al Microcontrolador repetir una y otra vez los kommandosoldater sv su interiör. Alli ejecutamos la función 'performCommand' para que se repita mientras el controlador esté encendido. También habilitamos el procedimiento de medición de distancia del sensor ultrasónico, valiéndonos de la función '' millis'' que realiza un conteo de lo microsegundos sv que el programa ha estado funcionando, así vamos comparando intervalos de 1000 milisegundos para ejecutar la funcion de medicion.

Tanque de guerra controlado por bluetooth

Robot Controlado Por Bluetooth

Tanque Oruga con video, controlado por android (app inventor) mediante bluetooth

Robot Controlado Por Wifi Con detektor De Intensidad De Señal
Ar Condicionado controlado por Arduino, via infravermelho e com medição de temperatura.

Conectar Android con Arduino por Bluetooth Capitulo 1
Tanken med video kontrolleras av app inventor android och bluetooth

ArduinoUNO, Bluetooth y kontroll de Servomotor

Arduino RC bil bluetooth con motor sköld

Robotic Arm(Inmoov) med Cortex M3 (brasilianska öppen hårdvara)

BB8 ritning turtle

Robot Educativo Fischertechnik Arduino (RAFA)

SIM900 GSM GPRS SKÖLD CON ARDUINO UNO
Makey Makey mus para Android

Pasar de 12V en 5V FN bil tft para la hallon
FN: S Seguidor Solar enkel que Tiene Ejes Duales

(Ascensor) Hiss modellen med hjälp av Arduino, App Inventor och annan fri mjukvaran

Varinha POV - BSB FAB LAB
