CNC ur en scanner (billigt)














De saker du behöver köpa är aluminiumprofil, stepper controller, Arduino, gängad stång, nötter & bultar.
Här används 6 x 1 mm gängade stavar.
Denna CNC maskin kan klippa Aluminium, Plexiglas och trä.
En dammsamlare har gjorts från 3 PVC rör limmas ihop (se bild).
En spindel lampa med 8 LED har tillverkats med denna CNC.
Jag använder LibreCAD och HeeksCAD ritningar och PyCAM eller HeeksCNC att generera G-kod skapas. Men hittade jag att det ibland är snabbare att skriva G-kod själv. Ofta måste du separata filer för borr, Innermått och yttermått. Det finns inget sätt att ange som är vilken när med gratis CAD-programvara. En fördel med dessa program är att de fungerar på både Linux och Windows verksamhetssystem. Men, du behöver göra en hel del av "händerna på" själv.
Z-axeln har en dålig design. Lagren driver stavar (7mm) åt sidan och detta orsakar stora spänningar i ändlägena (Z). Använd inte denna design! Det var en dålig idé.
Strömförsörjningen 300W tas från en PC.
Arduino styrelsen är laddad med GRBL, se GIT hub. GRBL (Arduino) tar emot G-kod form PC via USB-kabeln. Dock komma ihåg att GRBL har en begränsad uppsättning instruktioner och G-kod mus ibland antas begränsningar.
Stegmotorer: Z-axix: M42SP-6TE, y-axeln M49SP - 2K (Mitsumi). Jag tog motorerna från gamla skrivare. Genom x-axelns förstördes under provet så var jag tvungen att köpa en ny NEMA17 för att ersätta den.
Denna lösning kostar ca $40 och har en motreaktion på 0.3 mm. I en riktning har du 0,1 mm precision. Jag använder denna lösning för att göra delar för nästa generation.
Nästa steg (2.0) är att köpa linjär kullager. Detta kommer att förbättra precisionen och det finns en ny enkel anti motreaktion mutter som ska användas. Tyvärr genom att köpa linjära stång, linjära lager, stavar etc. priserna går upp en annan $100. Jag fortfarande använder gängstång men den här gången jag använder en hemmagjord ACME anti motreaktion mutter (se bild).
Här använder jag 25 x 25 mm aluminiumprofil och 8mm linjära stång och kullager. Jag köpte även 8mm axel stöd innehavare. 10mm transparent Plexiglas används som bulk materiellt. Nackdelen är att krossas lätt (se version 1.0 av XY-bord). Strategin som är denna gång att stödja det med aluminiumplattor.
VERSION 2: Jag använde den första version CNC maskinen för att göra delar för den andra versionen. Men jag bestämde mig också att köpa professionella mekaniska delar. Nu, det är inte en billig lösning längre men har bättre prestanda och precision. Jag uppskattar att bygga för att vara $150. Om du har tid kan du vinna auktioner på eBay, http://www.aliexpress.com/, http://www.banggood.com/ etc. Detta kommer att sänka priset markant. Du kan också hitta slutet kvarnar och andra verktyg på ovan nämnda platser.
Nema17 12V steppers används.
Bifogat DXF filer för Z-axeln. Notera den 0,7 och 2,5 mm förskjutningen för staven innehavaren och stadens stepper axel. Detta kommer att göra livet lättare. M6 mutter (anti motreaktion) kommer att vara på ens 1 mm avstånd från Z plattan och plattan kommer inte kolliderar med fyrkantsrör i slutet.
Jag använder ett Python-skript för att driva den G-kod till Arduino GRBL styrelsen. Jag har ändrat skriptet men jag skulle vilja expandera det mer och ha fler funktioner som verktyg för automatisk inställning och hitta en referenspunkt. Jag kommer att lägga skriptet här.
För nu sätta jag bara bilderna här.
Strömförsörjningen är närheten till racket.
Spindeln är ändrade. Jag tog motorn ur en liten gravör verktyg. Detta innebär att jag har hastighetskontroll och mer makt i version 2.
Bifogade 2 bilder av föremål tillverkade med V2 CNC. Noggrannhet är mycket bättre och under 0.1mm skulle jag gissa 0,05 mm. Plattformen är nu gjorda av Aluminium tallrikar 6mm och är nästan utan vibrationer.
Jag funderar på att sätta en video som visar prestanda och kanske DXF-filer för att design för Z-axeln.
TODO: ändra strömförsörjning för att högre utspänning. http://boginjr.com/wp-content/uploads/regulpsu.png för att få starkare grepp och fart.
Bild 3. visar en motor hållare (Al) och en del för en quadcopter. Artiklarna är bearbetas med version 2.

Hemgjord 3D Scanner på billiga
Den aldrig sinande duschen

CNC kopplare (DIY - billigt och lätt) apparatanslutningsdon
Hemgjord Mini svarv billigt med aluminiumlegering och linjära skenor bild CNC
DIY Drill Press hembakade Pressdrill mycket billigt med Skjut mekanism CNC
Hemma gjort billigt Mini svarv bild CNC

Hur man gör en tre-axeln CNC-maskin (billigt och enkelt)

Billigt, super känslig digitalisering probe för cnc... harkman's sond

Bygg din egen CNC-maskin.

CNC-maskin för att forma stora bitar av styrencellplast

Hemmabyggd (DIY) CNC router - baserade Arduino (GRBL)
Galaxen Scanner! (göra planetariska bilder hemma)

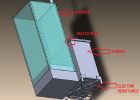
CNC Router inhägnad

Öl smakar kit med Ikea och CNC

Fyndpris bok Scanner från en kartong.

3D-Scanner: FabScan Pi

DIY CNC Router

Intellekten Galileo kontrollerade cnc plotter
