DIY Telepresence använder Ubuntu Laptop
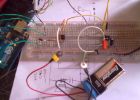
Om du titta på videon och se bilden, har jag gjort en mycket enkel DIY telepresence robot. Det är inte helt färdig men fungerar till den punkt att det är funktionellt. Här är vad jag använde:
1 x86 laptop. Jag använde Ubuntu OS men du kan nog göra detta med en raspberry Pi eller Windows baserad bärbar dator.
1 MSP430 Launchpad. Du kan använda en mikrokontroller med funktioner för UART och PWM
1 virtuell serieport (VSP). Jag tror du kan använda den seriella porten ansluten till startfönstret, men jag har alltid funnit dessa flakey
2 kontinuerlig rotation servon. Jag använder parallax servon
1 batteripack. Så länge det är över 4,8 Volt ska det vara bra. Du kan inte dra detta bort av USB-porten eftersom det är för servon och de drar mer ström än en USB-port kan leverera.
Sladdar. Det kan vara bäst att köpa en uppsättning av dessa om du är ny till ledningar grejer. Dessa gör livet så mycket enklare.
1 mini bakbord. Du kanske kunna komma undan utan detta. Som ni ser använde jag den.
3D tryckta kopplingar. Jag kommer att publicera en länk eller fil av dessa kontakter så du kan skriva ut din egen.
En andra dator att ansluta i till din lilla roboten.
Den grundläggande översikten av funktionaliteten är som följer. Datorn är värd lampa som du bara behöver Apache och PHP, men fan, MySQL är bra för framtida projekt. Detta gör att en fjärransluten användare trycka på knappar som skickar seriella kommandon över VSP till mikrokontroller. Mikrokontroller använder denna data för att kontrollera servon. Helt oberoende av detta är Skype, som används för att göra den "närvaro" delen av roboten.

DIY PCB använder flytande fotoresist

DIY | Ambilight använder Arduino Nano

Hur du använder gamla LAPTOP

DIY amazon Dash använder Intel Edison (Intel IOT)

DIY blacksmithing - konvertera din Grill i en smedja sedan använder den för att återvinna metallskrot i verktyg

DIY Arduino Unit Converter: Hur man använder LCD:

DIY Flex sensor använder Sugru och grafit pulver (Resistencia flexibla usando Sugru y polvo de grafito)

DIY PASSCODE LOCK SYSTEM använder ARDUINO (EEPROM baserat)
DIY avancerade PASSCODE LOCK SYSTEM använder ARDUINO

DIY Cat Purse använder anpassade foto

DIY vindrutan Protector från snö & solen använder foder säckar
DIY: Dörr larmsystem använder Arduino Uno

Hur man använder en limpistol utan Plugin - hantverk Life Hacks - DIY

DIY Safe användande mönster låsa sköld

101 + Hacks life använder ätpinnar

Sparky Jr. - DIY Telepresence Robot

Chibikart: Snabb-prototyper en subminiatyr elektriska Go-Kart använder Digital fabrikation och Hobby komponenter

Hur man använder en laserskärare
