Draadloze Controller (3 / 4 steg)
Steg 3: De koden

Het programmeren van de 2,4 Ghz verzender sv ontvanger är eigenlijk häl makkelijk vill er zijn meerdere bibliotek te vinden om dat voor elkaar te krijgen.
Het verzenden:
/*----------------------------------------------------
Programma om de variabelen mig te zenden vanaf de controller sv ontvangen naar de controller.
av: Dave den Haan
Signal - Arduino pin
GND 1 GND
VCC 2 5V
CE 3 8
CSN 4 9
SCK 5 13
MOSI 6 11
MISO 7 12
IRQ 8-
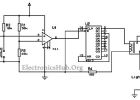
De eerste rij är de volgorde van de pinnen op de NRF24L01 sv de rij ernaast är waaraan het moet verbinden i arduino
-------------------------------------------------------*/
#include
#include
#include
#include
#include
#include
Definiera CE och CSN stift så att de kan ändras lätt senare om det behövs.
#define CE_PIN 8
#define CSN_PIN 9
Skapa en ny radio med CE & CSN Pins
RF24 myRadio (CE_PIN, CSN_PIN);
Skapa adress för sändande och mottagande
byte adresser [] [6] = {"1Node", "2Node"};
LCD-adress LiquidCrystal_I2C lcd (0x27, 2, 1, 0, 4, 5, 6, 7, 3, positiva);
Lägga till joystick & potmeter
CONST int JS_Y = A2; CONST int JS_X = A1; CONST int potkal = A3;
Lägg till datastruct om du vill spara överförda/fått värden struct dataStruct {int Y; int Kal; int X;} tData;
struct dataStruct2 {
float Serv; flyta snelheid = 0.00; } rData;
osignerade långa startLCD1 = 0; osignerade långa startLCD2 = 0;
int last_tData_Y; int last_tData_Kal = 16. float last_rData_Serv; flyta last_rData_snelheid = 200.
void transceive();
void rereshLCD();
void setup() {
Använd den seriella bildskärmen på baudvärde för 115200 Serial.begin(115200); Delay(250); Serial.println ("trådlöst överföra");
Starta radion
myRadio.begin();
Ställa in wifi kanal ovanför de flesta normala wifi kanaler
myRadio.setChannel(108);
PA nivå, välja vilket som ska användas. Låg, hög för testning med hjälp
myRadio.setPALevel(RF24_PA_MIN);
myRadio.setPALevel(RF24_PA_MAX);
Öppna läsa och skriva rör.
myRadio.openWritingPipe(addresses[0]);
myRadio.openReadingPipe (1, addresses[1]);
Delay(500);
Ställ in LCD
LCD.BEGIN (20, 4); LCD.Print (kolumn, linje)
lcd.setCursor (2, 0);
LCD.Print ("Wireless racerbil");
lcd.setCursor (6, 1);
LCD.Print ("från");
lcd.setCursor (3, 2);
LCD.Print ("Groep 4--SCS")
Initiera pinmodes
pinMode (JS_Y, indata);
pinMode (JS_X, indata);
pinMode (potkal, ingång);
Delay(3000);
LCD.Clear();
Ställa in LCD-skärm
lcd.setCursor (2, 0);
LCD.Print ("Wireless racerbil:");
lcd.setCursor (0, 1);
LCD.Print ("Kalibratie:");
lcd.setCursor (5, 2);
LCD.Print ("Accu %:");
lcd.setCursor (2, 3);
LCD.Print ("Snelheid:");
}
void loop() {
/*
Läs potvalue
Skicka värdet
*/
tData.X = map(analogRead(JS_X), 12, 1023,-255, 255);
tData.Y = map(analogRead(JS_Y), 13, 1023, 45, 130);
tData.Y = (analogRead(JS_Y));
tData.Kal = map(analogRead(potkal), 0, 1023, -6, 6);
Överföra data
transceive();
Reresh LCD
startLCD1 = millis();
om (startLCD1 - startLCD2 > 75)
{
refreshLCD();
startLCD2 = startLCD1;
}
}
void transceive() {
Serial.println ("starta transceiving");
osignerade långa started_tranceiving_at = micros();
bool succé = false;
myRadio.stopListening();
om (! myRadio.write (& tData, sizeof(tData)))
{
Serial.println ("misslyckades! GG");
}
annat
{
Serial.println ("succé!: D");
myRadio.startListening();
Succé = sant;
}
osignerade långa started_waiting_at = micros();
medan (framgång)
{
Serial.println ("väntar Daniel");
om (myRadio.available()) {
Serial.println ("Data ontvangen...");
myRadio.read (& rData, sizeof(rData));
Succé = false;
}
om (micros() - started_waiting_at > 200000)
{
Serial.println ("Timeout upptäckt!");
Succé = false;
bryta;
}
}
Serial.Print ("Total tid tranceiving:");
Serial.println(Micros() - started_tranceiving_at);
}
void refreshLCD() {
/*
Variabelen:
Accu %
Snelheid
potkal
accumelding
*/
om (tData.Kal! = last_tData_Kal)
{
lcd.setCursor (12, 1);
LCD.Print("");
lcd.setCursor (12, 1);
LCD.Print(tData.kal);
last_tData_Kal = tData.Kal;
}
om (rData.Serv! = last_rData_Serv)
{
lcd.setCursor (12, 2);
LCD.Print("");
lcd.setCursor (12, 2);
LCD.Print (rData.Serv, 0);
LCD.Print("%");
last_rData_Serv = rData.Serv;
}
om (rData.snelheid! = last_rData_snelheid)
{
lcd.setCursor (12, 3);
LCD.Print("");
lcd.setCursor (12, 3);
LCD.Print (rData.snelheid, 0);
LCD.Print ("km/h");
last_rData_snelheid = rData.snelheid;
}
}------------------------------------------------------------------------------------------------------------
Zoals ze te Lacke är hierboven är het een vrij lange kod maar hierin zijn 3 dingen al i verwerkt
namelijk de joystick voor het bewegen, en 1 knop. 1 voor het schieten en 1 voor het resetten.
Maar dit är alleen het verzenden nog maar.
Hieronder het ontvangen
------------------------------------------------------------------------------------------------------------
/*
Enkelt överföra program, överföring nummer börjar
*
*
* Signal - Arduino pin
* GND 1 GND
* VCC 2 5V
* CE 3 8
* CSN 4 9
* SCK 5 13
* MOSI 6 11
* MISO 7 12
* IRQ 8-
*/
#include
#include
#include
#include
#include
Definiera CE och CSN Pins
#define CE_PIN 8
#define CSN_PIN 9
Skapa nya radio med
RF24 myRadio (CE_PIN, CSN_PIN);
Adress för 1 sätt sänder
byte adresser [] [6] = {"1Node", "2Node"};
Få datastruct:
struct dataStruct {
int X = 0; //joystick
int Res = 0; //Reset
int Schiet = 0; //Schiet
} RData;
Flaggor
int Företagsflagga 1 = 0;
int Flag2 = 0;
int Flag3 = 0;
Utgångar
int Res = A0;
int Schiet = A1;
int Rechts = A2;
int länkar = A3;
void setup() {
Använda följetong monitor på baudvärde för 115200
Serial.BEGIN(115200);
Delay(1000);
Serial.println ("RF24 skicka prov").
pinMode (Res, OUTPUT);
pinMode (Schiet, OUTPUT);
pinMode (Rechts, OUTPUT);
pinMode (länkar, OUTPUT);
Meddelande:
Starta radion
myRadio.begin();
Ställ in kanal över wifi kanaler
myRadio.setChannel(108);
Setup Radio anslutning:
myRadio.setPALevel(RF24_PA_MIN);
myRadio.openWritingPipe(addresses[1]);
myRadio.openReadingPipe(1,addresses[0]);
Delay(1000);
myRadio.startListening();
}
void loop() {
myRadio.read (& RData, sizeof(RData));
IF(Flag1 = 0) {
myRadio.read (& RData, sizeof(RData));
IF(RData.X == 1)
{
Serial.Print("Rechts");
analogWrite (Rechts, hög);
Fälten Företagsflagga 1 = 1;
}
annat if(RData.X == 2)
{
Serial.Print("Links");
analogWrite (länkar, hög);
Fälten Företagsflagga 1 = 1;
}
}
IF(RData.X == 0)
{
Serial.Print("Stilstaan");
Fälten Företagsflagga 1 = 0;
}
IF(Flag2 = 0) {
IF(RData.res = 1)
{
Serial.Print("reset");
analogWrite (Res, hög);
Flag2 = 1;
}
}
IF(RData.res = 0) {
Flag2 = 0;
}
IF(Flag3 = 0) {
IF(RData.Schiet == 1)
{
Serial.Print("Schiet");
analogWrite (Schiet, hög);
Flag3 = 1;
}
}
IF(RData.Schiet = 0) {
Flag3 = 0;
}
}
De koden hierboven spreekt bästa wel voor zich eigenlijk. ALS de ontvanger dingen binnenkrijgt dan geeft hij simpelweg een pin hoog aan sv hiermee kan een vervolg aangegeven worden. I ons geval ord er op een andere arduino een ledmatrix aangestuurd om te schieten heen sv weer te bewegen av de spel te resetten.

Camo Xbox Controller
Automatisk tvättrum Light Controller krets

Hemgjord 100 HP Motor Controller för en elbil

200kW AC Motor Controller för elektriska bil
555 PWM Controller

En Wi-Fi baserat Controller för modelltåg, Halloween rekvisita, energi övervakning och mer!

Bluetooth SNES controller/gamepad

Costumized controller

Remote Controller Safe

Julljus fotocell Controller

Automatiska persienner Controller (PICAXE)

B & Q homeeasy hemautomation centralvärme controller hacka

Egen byggt MIDI-Controller

Dub Cadet: Holografiska MIDI & LED-Controller för Arduino - del 1

Elektriska Funkatron: En gitarr-stil MIDI Drum Controller

Dual Channel Sous Vide Controller

40 x RGB LED-Controller med 8-bitars PWM och valbara mönster

48 kanaler Mono / 16 kanal RGB LED-Controller
