Enkla Arduino Robotics plattform! (4 / 5 steg)
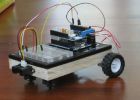
Steg 4: Lägga till en Netbook för att utforska okända världar på avstånd


Det finns många sätt att få detta arbetar, många är förmodligen mycket lättare än min, men jag inte är bekant med bearbetning eller script-baserade språk så jag valde för att använda Linux och C++ för att skapa en trådlös kontroll länk mellan min basstation (aka gamla ThinkPad) och min nya Lenovo IdeaPad netbook som är ansluten till Arduino drive base. Både PC kör Ubuntu. Min ThinkPad är ansluten till min skola LAN och min IdeaPad är ansluten till min WiFi-åtkomstpunkt som är också ansluten till skolans LAN (jag inte kunde få en tillförlitlig videoströmmen från skolan WiFi eftersom alla andra använder det, så jag satte upp min egen router för en bra anslutning). En bra anslutning är särskilt viktigt i mitt fall eftersom jag inte har genomfört någon felkontroll eller timeout. Om nätverksanslutningen plötsligt sjunker, roboten fortsätter att gå tills det kraschar till något eller jag springa och stoppa den. Detta är den viktigaste faktorn bakom mitt beslut att bromsa drivlinan både genom nedväxling motorerna och genomföra en programvara hastighetsbegränsning.
Carduino - A enkla Arduino robotics plattform med ett eget bibliotek

(Ännu en) DIY Arduino Robotics Platform-A Robot chassi från reservdelar

Enkla Arduino Arm (Pan/Tilt)

CupBot - 3D tryckt Robotics plattform

Intellekten Edison och Ridemakerz RC chassi Robotics plattform

DIY 4WD bil organ för arduino robotics projekt och RC bilar

Enkla Arduino PIR rörelse detektor modul Demo

Enkla Arduino kontrollerade Aquaponic System

Enkla Arduino seriell kommunikation.

Enkla Arduino trådlösa Mesh

Enkla Arduino Monome

FunShield, en Arduino pedagogiska plattform

Enkla Arduino LED flagga Flasher

Dumma enkla Arduino LF RFID Tag Spoofer

Mycket enkla Arduino elektriska lås

Enkla arduino virtuella knappsatsen
Enkla Arduino Sunrise lampa

Enkla Arduino stoppur
