Gör: it Robotics startkit - analysera LineFollowing.ino Del1

I vår senaste blogginlägg fångade vi några sensordata från tre olika positioner vår robot kan stöta på när du följer den svarta linjen, (vänster sensor svart, vänster sensor/höger sensor vita, rätt sensor svart).
I denna blogginlägget vi kommer att ta att sensordata och köra det grundliga våra readOptical.py Python program och utvärdera vad som händer i vårat lineFollow.ino.
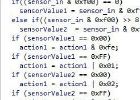
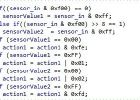
Vi kommer att titta på följande avsnitt av kod:
om ((sensor_in & 0xf00) == 0) sensorValue1 = sensor_in & 0xff;
annars om ((sensor_in & 0xf00) >> 8 == 1)
sensorValue2 = sensor_in & 0xff;
om (sensorValue1 == 0x00) insats 1 = Åtgärd1 & 0xfe;
om (sensorValue1 == 0xFF) insats 1 = insats 1 | 0x01;
om (sensorValue2 == 0x00)
insats 1 = insats 1 | 0x02;
om (sensorValue2 == 0xFF)
insats 1 = insats 1 & 0xfd;
om (insats 1! = åtgärd2)
{
om (insats 1 == 3)
line_following.go_forward(50);
om (insats 1 == 1)line_following.line_following_turn_left(50);
om (insats 1 == 2)line_following.line_following_turn_right(50);
om (insats 1 == 0)
line_following.go_forward(50);
}
åtgärd2 = Åtgärd1;
Våra readOptical.py Python ganska mycket innehåller ovanstående kod, men också beräknas de bitvisa operatorerna och konverterar programmet uttalanden (uttryck) till ett binärt så vi kan lätt se vad programmet gör verkligen.
Kolla in min blogg för mer info:
http://joepitz.wordpress.com/
Gör: it Robotics startkit - analysera LineFollowing.ino del 2
Gör: it Robotics startkit - skicka Sensor Data trådlöst
Gör: it Robotics startkit - förståelse bitvis Math

Gör: it Robotics startkit-trådlös Connectivity

Gör: it Robotics startkit-förare ombord förtrogenhet

Gör: it Robotics Starter Kit fånga Sensor Data

Linje följande Robot med grundläggande PD (proportionell-derivat) kontroll

Grundläggande raden efter Robot med Arduino

FÅ din BOT på: Robotics Hackathon Robot Demo

DIY 4WD bil organ för arduino robotics projekt och RC bilar

Brand startkit

Locutus av Borg kostym (Cyborg) med riktiga robotics, ljus och ljud och 36.000 mAh makt!
Automatiskt beräkna och analysera händelser med Wolfram Data droppa och Prota OS

90 graders Adapter för VexPro VersaPlanetary växellåda för första Robotics

Aerobox - ett mjukt Robotics System

FPGA Robotics Vision för någon
Analysera din Facebook data med Plotly

Analysera en enkel takstol med metoden för lederna
