Grundläggande tank-drive robot kontroll över Bluetooth med mbed med Freescale K64F


Detta Instructable är baserad på detta tidigare arbete som visar hur man styr en typisk tank-drive stil robot med hjälp av Arduino och en Android app, som visas i denna RC bil för Android Instructable.
Jag har använt detta arbete som grund för många robotar i de senaste åren som Teo Jansen inspirerade vandrande chassi som visas på http://boim.com/Walkin8r/
och en full storlek fjärrkontroll rullstol,
Detta Instructable tar bas Arduino koden, och port det att fungera på den Freescale K64F ARM Baserat microcontroller styrelse, med hjälp av mbed.org on-line IDE.
Användningen av denna styrelse med mbed IDE är mycket lik andra mbed aktiverat styrelser.
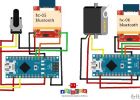
Detta exempel använder en 30A DBH-1A controller från wingxine och en serial-over-Bluetooth-modul som HC-06.
Motorn förarens koden bygger bort av några lite enklare kod som kontrollerar den vanligare L298N baserade motorstyrning moduler. Kommentera ut raden #define DBH1 i main.cpp att återgå till standard L298N logik.
Du behöver en 4-pin 1-rad kvinnliga 2,54 mm avstånd rubrik att montera HC-06 K64F styrelse. För DBH-1 x serien styrenheter vill du en 10-12 pin 2-kvinnliga radrubrik, medan de L298N modulerna brukar ta en 6-pin 1-kvinnliga radrubrik.

Servo kontroll över Bluetooth med Accelerometer

Grundläggande raden efter Robot med Arduino

Linje följande Robot med grundläggande PD (proportionell-derivat) kontroll

Enkla RC bil för nybörjare (Android kontroll över Bluetooth)

S.A.W. rustningen Tips och Tricks: grundläggande gas drivs airsoft pistol koncept
Servo motorisk kontroll via bluetooth med potentiometer
Arduino Bluetooth grundläggande handledning

CxemCAR 1 - Android kontroll RC bil över Bluetooth

Grundläggande remskiva mekanismer

Arduino nybörjare och grundläggande elektronik Kit Primer

Grundläggande elektriska kontinuitet testare

Grundläggande bromstrumman Forge för under $40

ESP8266 Grundläggande IoT ljus

Grundläggande Hand Held Radio hacka för en motorcyklist.

Recept: En grundläggande släktklenod tomatsalsa

Det mest grundläggande i en div-baserade webbplats

Bordsskiva Arcade Machine grundläggande @ Premium modeller

Hur man rita - grundläggande linjära perspektiv
