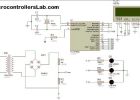
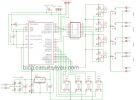
GSM baserade mångsidig Robotic fordonet med hjälp av PIC mikrokontroller


Konventionellt Wireless-kontrollerade robotar användning Rf kretsar, som har begränsad arbetande utbud, begränsade frekvensområdet och begränsad kontroll. Användning av en mobiltelefon för Robotic kontroll kan övervinna dessa begränsningar. Det ger fördelen av Robust reglering, arbetsområde så stor som området av tjänsteleverantören, utan inblandning med andra styrenheter. Även om utseendet och funktionerna i Robot varierar kraftigt, dela alla robotar funktionen av en mekanisk, lös struktur Under någon Form av kontroll. Kontroll av Robot omfattar tre olika faser: Perception, behandling och åtgärder. Allmänt, Preceptors är sensorer monterade på roboten, bearbetning är gjort av On-board mikrokontroller eller Processor och uppgiften är utfört med hjälp av motorer eller med vissa andra manöverdon. I detta projekt roboten är ansluten till GSM mobil (med DTMF-teknik) som kontrolleras av användaren mobiltelefon. Med hjälp av kommandon kan vi flytta vår Robot i önskad riktning enligt våra krav. Detta projekt är avancerad version av mitt senaste projekt, nämligen trådlös radiofrekvens-modul med hjälp av PIC mikrokontroller.
Sinusvåg frekvens mätning med hjälp av pic mikrokontroller

Hur ska blinka en Led med hjälp av PIC mikrokontroller?
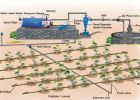
GSM baserade automatiserade bevattningssystem med regn-Gun

DTMF-baserade hinder AVOIDER ROBOT

Robot Attiny2313 med Bluetooth HC06 och stegmotorer

Robot kostym med lysdioder
GSM baserade hemautomation

Hur man gör en robotic bil med fjärrstyrda. (Ashwini sinha).

Mobil kontrollerade robotic bilen med arduino och DTMF

Robotic Hand med gest recogntion - AVATAR

Hur man gör en All-riktning fordonet med Mecanum hjul
Gest kontrollerade robotic bil med android ansökan

Ren sinusvåg växelriktare med pic mikrokontroller
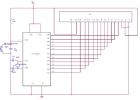
Gränsyta 16 X 2 LCD med PIC mikrokontroller

Trådlös radiofrekvens modulen med PIC mikrokontroller.

GSM baserade relä växlar med hjälp av Arduino UNO

Baserade Arduino humanoid robot med servomotorer

GSM baserade brandlarm
