Hur man gör en intelligent robot
Prenumerera på oss på YouTube uppdateringar http://www.youtube.com/channel/UCsSdGsFs8Cby3oxiMH...
4 axel robot arm med en liten gripper och undervisa funktion. (I själva verket: det är en 3 axel robot)
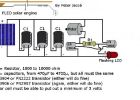
Denna robot kan följa. Denna robot kan lära dig. Och denna robot kan upprepa endles. Och han förlorat allt sitt minne om Batterien är låga. Detta gör det nya hela tiden han drivs igen. -Idén till detta projekt är tagen från http://letsmakerobots.com/node/21633 - Stoerpeak fick mig att göra det! -Arduino mini pro 5V / 16MHz 4 mikro servon 180degrees 4 22 k potentiometer NmH batteri 4.8V ledningar, knappen, växla Balsa trä, metall, plast Zip band och lim lär läge: efter en återställning robotarm följer avsnittet lär i arm medan enkel mappning av analogt ingångar varje 25ms till servomotorer. Att trycka på knappen lagrar varje servo position i en array spelläge: dubbel-tryck på knappen Växla till uppspelningsläge. Skissen läser matrisen steg för steg och och flyttar robotarmen. För cool loocking rörelser lagt jag en rutin beräknar olika mikrosteg för varje servo rörliga ska starta och avsluta sync på alla axlar. Också lagt till en ramp för mjuk öka/minska hastigheten. Kortare resor avstånd roboten gör sakta, längre sträckor med snabbare hastighet. Handlar om timing så mina tankar i denna stund Play Mode version 1.1 gripdon indata används för att ange fördröjningen (0,1,3,15,60,300 sekunder) efter en slinga är gjort. Växeln (det var kvar från projektets början) pausar robot 08/2015 jag lagt samma kod 1.3 men jag försöker lägga till engelska kommentarer 10/2015 flödesschema för kod och elschema. (kontrollera att du använder en pullUp motstånd på input 4,6 / ändra kod för input 4. Detta bör åtgärda "långsamt rinnande problemet" ofta hände)

Hur man gör en mini robot

Hur man gör en knex robot

Hur man gör en Instructables Robot hud i Minecraft

Hur man gör en RC Robot ram

Hur man bygger din första Robot ($ 85)

Hur man gör en Delta Robot av Makeblock

Hur man gör en cool robot från en RC-bil

Hur man gör skrivbords dammsugare robot

Hur man gör en Mecanum Robot med fjädring
Hur man gör en solar robot!

Hur man bygger ditt eget Instructables Robot assistent

Hur man bygger din egna sugru robot, Fixbot

Hur man gör mänsklig robot att vågor, nickar och skakar på huvudet

T, G, B, F robot. Hur man bygger vår awesome robot

Hur man gör en Instructables Robot USB driva

Hur man bygger en 3D-tryckt robot renar leksak

Hur man bygger en vikt dra Robot

Hur man gör en avantgarde Robot Mask
