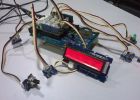
Intellekten Edison/Seeed/Nexus 3WD OmniRover

Jag har nyligen arbetat på en enkel, hackathon-vänlig kit för mobil robotik baserat på modulen Intel Edison. Mitt mål är en robot kan autonom navigering och rundstrålande rörelse för mindre än $250, inkluderat (processorn och batteri samt alla mekanik och elektronik). Jag ville också att det ska vara möjligt att bygga den utan lödning i under en timme ("ingen lödning" är eftersom det är svårt att göra i vissa hackathon lokaler, som hotel balsalar).
Medan min "kit" är inte ännu komplett jag delar mina nuvarande framsteg här, kommer att sedan uppdatera som den utvecklas. Just nu systemet har ett par frågor: Jag behöver fortfarande en bra sensor paketet för autonom navigering, kablage lösningen skulle kunna förbättras, är det inte helt lödtenn-fri, och jag behöver en bättre sätt att göra batteri nivå avkänning. Men det grundläggande systemet ligger nära uppfyller mina mål, och systemet kan göra en fin grund för ditt eget robotics projekt.
Jag arbetar också på en mjukvaran bunt baserad på Node.js som en utveckling av kursen har jag undervisat på med Node.js för programmering IoT program. Det är också ganska ännu inte redo för release men i slutet av detta instructable jag även ett enkelt Node.js test script som visar de flesta av nödvändig hårdvara gränssnitt. Du kan jämväl använda det som grund för egna projekt.
Jag bör nämna här att jag är ingenjör Intel men alla åsikter jag uttrycker här är mina egna.

Intellekten Edison levande temperatur uppvisning

Intellekten Edison buller larm (Intel IoT)

Intellekten Edison Metronome

Intellekten Edison Fat Bike Tire Analyzer

Intellekten Edison/Arduino temperatur uppvisning med momentan bakgrundsbelysning

Intellekten Edison - Initial Setup

Intellekten Edison morsekod tränare

Intellekten Edison enkelt avstånd Sensor med Grove LED Bar indikator och Summer
Intellekten Edison: Hetta mätare, TMP36

Intellekten Edison driftigt bluetooth audio.

Intellekten Edison Universal Translator

Intellekten Edison talar till Linkit en

Intellekten Edison - Robot

Intellekten Edison kör Python skript

Intellekten Edison Telepresence robot

Intellekten Edison AirQualitySensor

Intellekten Edison Gas sensorsystem att upptäcka Biogas / gasol läckage
Intellekten Edison IoT WiFi Termostate #IntelMaker
