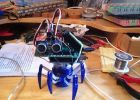
Robotic Mekaniska Spider





För mitt år 13 teknik projekt fick jag i uppdrag för att göra ett projekt i mina val för en intressent. Jag bestämde mig att designa, bygga och implementera en avlägsen kontrollerade mekanisk spindel, eftersom, varför inte?
Detta projekt är en sammanslagning av både komplicerade och enkla komponenter; från relativt lätt ram till en radiosändare, elmotorer och andra diverse komponenter. Jag gjorde hela projektet först med Autodesk Inventor Professional 2013 och jag kommer att ladda upp min CAD-filer om ombeds.
Detta projekt var ganska svårt att göra jag rekommenderar inte genomföra det om du inte är behöriga i en rad olika workshop färdigheter inklusive elektronik. Också det skulle göra detta projekt en fan så mycket enklare om du hade tillgång till en vatten jet eller laser cutter eller något liknande som kan automated precision kapning, som jag inte och det tog mycket lång tid minst sagt (typ av anledningen till varför jag är att ange)
Jag är bara en student och jag är säker på att det finns många alternativ för de olika komponenterna jag gjorde som den roterande mekanism som skulle vara mycket lättare än vad jag slet över så dina synpunkter skulle vara mycket uppskattat och gärna slänga dina idéer i mixen och se vad som fungerar
Den färdiga produkten skitters runt som ingen verksamhet och är garanterat att skrämma skiten ur någon sällskapsdjur, stora gnagare eller små barn som händer på den.
Material - detta projekt kommer att kräva inköp (eller smygande hämtning) av...
- 4 elektrisk motor växellåda ställer
- Två kanal sändare och mottagare
- Pensel motor varvtalsregulator, minst 20 Amp
- En standard servo
- Ledningar för lödning
- 3 x 50 mm x 1 meter aluminium bar
- 1,5 m ^ 2 i 3 mm akryl blad av önskad färg
- 1,5 m av 5mm gängad stång
- 500 mm x 5 mm mässing stav
- Liten bit av mässing plåt
- 250mm ^ 2 av 20mm plast för roterande kugghjul
- 100 mm 15mm nylon stav
- 5mm nitar
- Den största högen av 5mm låsmutter och brickor kända för mänskligheten.
(Obs: för att vara så grönt och ekonomisk som möjligt jag tog isär en fjärrkontroll bil och återanvändas sändare, mottagare och hastighet controller, även batteriet jag använde var en extra en som låg runt så jag kunde hitta en användning för det också.)
Verktyg
- Hand borrmaskin och borr
- Drill press
- Bågfil
- Filer
- Scriber
- Scroll Saw
- Superlim
- Lödkolv och löd
- Plast bender (eller en varm luft pistol om du inte har tillgång till en)
- Riveten pistol med nitar
- Mill
- Bandslip
- Metall svarv
- Blåslampa
Obs: Klicka på bilderna för att Visa anteckningar som matchar texten. Jag ber om ursäkt för några suddiga bilder.
Det här är en länk till min färdiga rapporten som har en mer ingående diskussion om mitt projekt: om du har någon avsikt att göra detta projekt jag rekommenderar att läsa den! https://docs.Google.com/file/d/0B4EnwQ3Y1QiGSEhaUDVsbXFmUmM/Edit
Också kredit till min vän Ben Murton, som var till stor hjälp med min första Instructable.
Robot mekaniska skalbagge. V1

Mekaniska spider

Arbetar med robotar

[DIY] Spider Robot (Quad robot, fyrfotingen)

Förbättrad Spider Robot

3-D tryckt mekaniska Walking Robot leksak!

Hexapod4 Spider Robot bruksanvisning

[DIY] Spider Robot - del II - Remote control

Mainan Anak-Robot Laba Larsson - bygga DIY Spider Robot

[vPython] Spider Robot simulator

Mekaniska ljus Sensing och Flex sensorer kontrollerade blomma Robot
Hex bugg spider med en hjärna (autonom robot)

Arduino Nano baserat Hexbug Scarab Robotic Spider

Spider Pig - autonoma hexapod robot

Robotic Spider V8

Enkel mekanisk (robotic hand) gjord av kedjan
Svanmärkt mekaniska Robot Hand

3D tryckt "Transformers" Robot - Spiderbot
