Toy Motors (3 / 3 steg)
Steg 3: Varvtal, belastning och ström

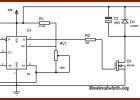
Ibland måste en har undrat, Geared DC-motorer har olika varvtal för samma potentiella skillnad. För att kontrollera hastigheten eller varvtal av en DC motor vi kan begränsa den tillförda effekten till motorn. Men eftersom nuvarande beror på banan, vi hårt kommer att kunna styra it utan att störa kretsen. Således det enda alternativet som återstår är spänning kontroll och för konstant spänning vi kan bara begränsa spänningen av olika spänningsregulatorer som om vi vill köra en motor på 5 volt kan vi använda IC LM7805 för att begränsa spänningen (fungerar upp till 35 volt), eller kan vi minska RPM genom att införa en växellåda på axeln. Denna metod framför allt ökar belastningen på axeln till följd av vilken motor efterlyser ett större aktuella värde. Till exempel jag utföra ett experiment på DC-motorer och deras lastkapacitet och jag fick följande data: ström för en leksak DC-motor var 50mA, för 100 RPM motor det var 190mA, för 600 RPM var 600mA, etc. Således, att välja ett felaktigt par av motor-batteri som kan begränsa din Bot prestanda till några minuter kanske.

Fula ankungen Robot

Hur göra Spinner Top Toy från DC Motor

Hur man gör en snurrande motor top toy!
En enkel homopolar motor

Hur man gör en Smart Toy - Smart Toy del 1 - bygga din leksak

Humvee barn säng med Toy Box

DIY Pottery Wheel (med löpband motor)

Homopolar Motor

Blumcaw Cupcake (blinkar, LED, ultraljud, Motorized, kacklande, Arduino, häxa) med 3d tryckta delar

CAD-V8-motor
DC Motor varvtalsreglering med PWM

DIY 48V 1000W bakre Hub Motor 20" Electric Vehicle

Elektrisk cykel Hub Motor - hur man byter en Hall-effekt Sensor

Hemgjord 100 HP Motor Controller för en elbil
Hur man gör vatten motor

Hur man gör en anpassad elektriska Go-Kart och borstlösa DC Motor

Hur att reparera en Brushfull Motor

Göra en borstlös DC Motor
