Trä Gear Clock med Stepper Motor Drive (16 / 19 steg)
Steg 16: Nya Stepper Motor



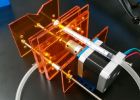
Bilderna visar stegmotor, driver sköld och resultatet efter förändringen.
Stepper motor är en mycket mer omfattande än tidigare "leksak" motorn. Arduino shield är lite overkill eftersom det kan driva två stepper eller fyra DC-motorer eller servon. Båda delarna var dock sitter på hyllan tiggeri att användas.
Nej, vi titta på "gear matematik" för denna motor. Det kliver 1,8 grader per steg. Därför krävs ingen heltal multipel av som kommer att ge oss 6 grader som för en andra rotation. Så, placerade jag en 1:3 förminskning utrustar mellan motorn vilket resulterar i 0,6 grader per steg. Hurra, 10 steg kommer att ge 6 grader, inte bara en tillnärmning, men exakt 6 grader.
Detta kommer att eliminera de invecklade korrigeringar som behövs för den tidigare versionen. Motorn och föraren är båda mycket toleranta mot olika matningsspänningar. Jag använde en oreglerad 7,5 VDC 400 mA plug-in strömkälla som matar den motorn föraren och Arduino. Inga andra spänningsregulator behövs.
Adafruit medföljer också ett bibliotek för motoriska funktioner. Detta krävs en närmare titt. Stegmotorer med två spolar kan drivas i flera lägen, kallas ofta "enkel", "dubbel", "interfolierade" och "mikrosteg". Arkivet innehöll några överraskningar. Den enda läge som kan vända motorn snabbast, blir faktiskt motor med 6 grader för 10 steg. Det enda läget producerar betydande buller. Jag använder det bara för den enstaka synkroniseringen mellan mekaniska och elektroniska klockor.
När klockan körs i normalläget, använder utvecklas den andra handen 6 grader en gång per sekund, jag den långsammare och mycket mer lugn mikrosteg läget. Här kom en överraskning. Biblioteket step-funktionen i det läget kräver 9 steg för 6 grader. OK, som vanligt i C++, börjar räknar ofta med 0. Ergo, innebär antalet 9 i steg funktionen faktiskt 10 steg.

TB6560 Microstepping bipolär Chopper Stepper Motor Driver

Laser skär gear clock - med ChronoDot!
DIY sprutpumpen med Stepper Motor

ARDUINO UNO + TB6560 Stepper motor driver

Ställa in en Stepper Motor Driver

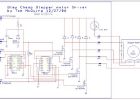
Enkla Stepper Motor Driver för Arduino CNC projekt

Bipolära Stepper Motor Driver

Dansar Tippy med arduino och stepper motor

Gear Clock

Intellekten Edison: Ställa in Stepper Motor

Arduino hårdvara PWM för stepper motor enheter

Designa en 3D tryckt pärlstav ball chain remskivan för Stepper Motor NEMA 17 på TinkerCAD

Geneva Drive Gear Clock
Lätt att bygga CNC Mill Stepper Motor och Driver kretsar

Jorden världen roterar med Arduino eller Raspberry Pi kontrollerade Stepper Motor

Stepper Motor Easy Driver

Kör en Stepper Motor med en AVR mikroprocessor

Kontroll DC och stepper motors med L298N Controller moduler med dubbla motorer och Arduino
