Använda en Accelerometer och gyroskop med Arduino







Först lite grundläggande information:
Gyroskop mäter rotationsrörelse i grader per sekund. De kommer inte direkt säga information om tilt, enda rörelse kring en axel. Accelerometrar mäter acceleration, kan du enkelt använda denna information för att beräkna lutningen på ett objekt genom att dra ifrån aktuella accelerometer data från ett värde som du vet är noll tilt.
För detta projekt använde jag 5 frihetsgrader IDG500/ADXL335 styrelse från Sparkfun. Jag gillar detta forum eftersom det visar accelerometer och gyroskop informationen som 5 analoga spänningar som enkelt kan läsas med hjälp av fem av de Arduino analog ingång stift. Några accelerometrar och gyroskop utgång data digitalt genom att koda det i en puls-bredd modulerad signal (PWM). Om du är kort på analog ingång stift på din Arduino, det kan vara en bra idé att använda en av dessa digitala marker, men den analoga chips är trevligt eftersom de kräver minimal ansträngning att få arbeta.
Reservdelslista:
IMU analoga Combo styrelse - 5 frihetsgrader IDG500/ADXL335 Sparkfun SEN-11072
Arduino Uno Sparkfun DEV-11021
manliga header pins Sparkfun PRT-00116
22 gauge tråd
skärbräda
Så här:
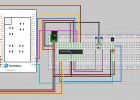
Löda header pins till accelerometer/gyro ombord. På en skärbräda Anslut Arduino 5V till "RAW" stift, Arduino mark till mark, sedan stift märkt X Acc till A0, Y-Acc till A1, och Z-enl A2
Koden nedan visar X, Y och Z accelerationen fro din styrelse i följetong monitor (ctrl/Kommando + Skift + M). Jag försökte att centrera värdena runt en nollpunkt genom att införa variabeln "noll" i min kod och sedan subtrahera alla mina inkommande data från detta nummer. Detta sätt när styrelsen hålls parallellt med marken, läsa X och Y accelerationen både 0. När styrelsen tippas positiva X kommer den att visa ett positivt tal, och när det tippas negativa X visas ett negativt tal (detsamma gäller Y). Denna accelerometer kod kan du bestämma inriktningen på din bräda i 3D-rymden.
Analoga Accerometer w följetong
av Amanda Ghassaei
Augusti 2012
/*
* Detta program är fri programvara; Du kan vidaredistribuera det och/eller ändra
* det enligt villkoren i GNU General Public License som offentliggjorts av
* den Free Software Foundation; antingen version 3 av licensen, eller
* (på ditt alternativ) någon senare version.
*
*/
setup upp accerleation variabler
int xAcc;
int yAcc;
int zAcc;
int noll = 282; //this var noll punkt värdet för min accelerometer, din styrelse kan vara något annorlunda. se kommentaren nedan för att beräkna detta med en egen styrelse.
void setup() {
Serial.BEGIN (9600); //set upp följetong
}
void loop() {
Läs värden
xAcc = analogRead(A0);
yAcc = analogRead(A1);
zAcc = analogRead(A2);
/**
Om du vill bestämma noll punkt för din styrelse,
kommentera ut de sista åtta raderna i denna slinga och avkommentera raderna nedan.
Håller styrelsen parallellt med marken och titta på seriell övervaka,
xAcc och yAcc värdena kommer att sväva runt ett gemensamt värde,
Detta är din "noll" värde. Ändra värdet för den variabel "zero" ovan.
**/
//Print värden
Serial.Print ("xAcc");
Serial.println(xAcc);
Serial.Print ("yAcc");
Serial.println(yAcc);
Serial.Print ("zAcc");
Serial.println(zAcc);
Serial.println("");
fördröjning (500), //wait
skriva ut värden
Serial.Print ("xAcc");
Serial.println(Zero-xAcc);
Serial.Print ("yAcc");
Serial.println(Zero-yAcc);
Serial.Print ("zAcc");
Serial.println(Zero-zAcc);
Serial.println("");
fördröjning (500), //wait
}
Ibland kan du använda ett gyroskop för att få roterande information om din styrelse som inte kan beräknas med en accelerometer. Anslut stift märkt Vref till A0, yRate till A1, xRate till A2, y4.5 till A3 och x4.5 till A4 på en skärbräda.
Du kanske undrar om skillnaden mellan X / YRate och X / Y4.5 utgångar. Gyroskop mäter grader per sekund, denna gyroskop utgångar en spänning baserat på graden av rörelse per sekund så vi kan säga att det mata volt per grader per sekund (V / ° / s). Från databladet för gyroskopet kan vi se att X / YRate mata ut data med 2.0mV/°/s känslighet och X / Y4.5 mata ut data med ca 4,5 gånger känslighet eller 9.1mV/°/s.
Ladda upp följande kod för att visa utdata från var och en av dessa (fig 6).
Analoga Gyro w följetong
av Amanda Ghassaei
Augusti 2012
/*
* Detta program är fri programvara; Du kan vidaredistribuera det och/eller ändra
* det enligt villkoren i GNU General Public License som offentliggjorts av
* den Free Software Foundation; antingen version 3 av licensen, eller
* (på ditt alternativ) någon senare version.
*
*/
setup variabler för gyroskop
int xRate;
int x45;
int yRate;
int y45;
int Vref;
void setup() {
Serial.BEGIN (9600); //start seriell
}
void loop() {
Läs värden
x45 = analogRead(A4);
y45 = analogRead(A3);
xRate = analogRead(A2);
yRate = analogRead(A1);
VREF = analogRead(A0);
skriva ut värden
Serial.Print ("xRate");
Serial.println(xRate);
Serial.Print ("yRate");
Serial.println(yRate);
Serial.Print ("Vref");
Serial.println(VREF);
Serial.Print ("x4.5");
Serial.println(x45);
Serial.Print ("y4.5");
Serial.println(y45);
Serial.println("");
Delay(500);
}
Jag ville noll denna kod som jag gjorde med accelerometer koden ovan. Jag väntade utgångarna från x och y gyro till lika utdata från Vref medan enheten hålls stationära, men som ni kan se i bild 6, detta är inte fallet (om någon har en förklaring till detta jag skulle älska att höra det!). Eftersom Vref inte var Gud referens för mig noll min utgång till, jag använde några förinställda värden baserade på data från fig 6, du hittar dem i mina print uttalanden i koden nedan. Jag tog också bort övervakning av Vref eftersom det verkade vara stabil oavsett hur mycket jag flyttade enheten, här också bevarat jag en analog ingångsstift på Arduino.
Analoga Gyro w följetong
av Amanda Ghassaei
Augusti 2012
/*
* Detta program är fri programvara; Du kan vidaredistribuera det och/eller ändra
* det enligt villkoren i GNU General Public License som offentliggjorts av
* den Free Software Foundation; antingen version 3 av licensen, eller
* (på ditt alternativ) någon senare version.
*
*/
setup variabler för gyroskop
int xRate;
int x45;
int yRate;
int y45;
int Vref;
void setup() {
Serial.BEGIN (9600); //start seriell
}
void loop() {
Läs värden
x45 = analogRead(A4);
y45 = analogRead(A3);
xRate = analogRead(A2);
yRate = analogRead(A1);
VREF = analogRead(A0);
skriva ut värden
Serial.Print ("xRate");
Serial.println(287-xRate);
Serial.Print ("yRate");
Serial.println(256-yRate);
Serial.Print ("x4.5");
Serial.println(317-x45);
Serial.Print ("y4.5");
Serial.println(172-y45);
Serial.println("");
Delay(500);
}
Resultaten från denna kod visas i figur 7. Rotation kring x- och y axlarna kommer att ändra värdena för xRate, x4.5, yRate och y4.5.
Jag använde denna accelerometer/gyro i en Arduino-baserad MIDI-controller jag jobbat på. Nedan är koden för de två programmen jag demoed i videon på toppen av detta instructable. Jag kopplade alla tre axlarna av accelerometern och de två 4.5gyro utgångarna för detta projekt.
enstaka pixel flyttar, utlösa MIDI (använder bara x och y accelerometer):
Accelerometer test-singel pixel
Amanda Ghassaei 2012
/*
* Detta program är fri programvara; Du kan vidaredistribuera det och/eller ändra
* det enligt villkoren i GNU General Public License som offentliggjorts av
* den Free Software Foundation; antingen version 2 av licensen, eller
* (på ditt alternativ) någon senare version.
*
*/
PIN-anslutningar
#define ledLatchPin 6
#define ledClockPin 5
#define ledDataPin 7
#define buttonLatchPin 4
#define buttonClockPin 3
#define buttonDataPin 2
installationsprogrammet för varibles för gyroskop/Accelerometer
int xGyroRAW;
int yGyroRAW;
int xAccRAW;
int yAccRAW;
int zAccRAW;
byte xGyro;
byte yGyro;
byte xAcc;
byte yAcc;
byte zAcc;
looping variabler
byte i.
byte j;
byte k;
lagring för ledde staterna, 4 byte
byte ledData [] = {0, 0, 0, 0};
lagring för knappar, 4 byte
byte buttonCurrent [] = {0,0,0,0}.
byte buttonLast [] = {0,0,0,0}.
byte buttonEvent [] = {0,0,0,0}.
byte buttonState [] = {0,0,0,0}.
knappen Dämpningstid counter - 16 byte
byte buttonDebounceCounter [4] [4].
variabler för accelerometer pixel rörelse
booleska firstPress = 1;
byte movingPixel [] = {0, 0, 0, 0};
byte yPosition;
byte xPosition;
int timeX = 0;
int timeY = 0;
booleska dirX = 0;
booleska dirY = 0;
byte lastX = 4;
byte lastY = 4;
MIDI-variabler
int hastighet = 100;
int noteON = 144;
int MIDIoffset = 60.
byte AktuelltX;
void setup() {
DDRD = 0xFA; //set stift D7-D4 som D2 som indata-utdata
Serial.BEGIN (31250); //MIDI överföringshastighet
Serial.BEGIN(9600);
(CLI); //stop avbrott
Ställ in timer1 avbrott vid 1kHz
TCCR1A = 0; / / Ställ in hela TCCR1A register till 0
TCCR1B = 0; / / samma för TCCR1B
TCNT1 = 0, //initialize counter värde till 0.
ställa in timer räknas 1khz steg
OCR1A = 1999. / / = (16 * 10 ^ 6) / (1000 * 8) - 1
Aktivera CTC läge
TCCR1B | = (1 << WGM12);
Ange CS11 bit för 8 prescaler
TCCR1B | = (1 << CS11);
Aktivera timern jämför avbrott
TIMSK1 | = (1 << OCIE1A);
SEI (); //allow avbrott
}
ISR(TIMER1_COMPA_vect) {//Interrupt på freq 1 kHz
timeX ++; //increment timeX
timeY ++; //increment timeY
Skift (); //send data till lysdioder
}
buttonCheck - kontrollerar status för en viss knapp.
denna buttoncheck funktion är i stort sett kopierade från monome 40h firmware brian crabtree och joe sjö
void buttonCheck (byte rad, byte index)
{
om (((buttonCurrent [rad] ^ buttonLast[row]) & (1 << index)) & & / / om det aktuella fysiska knapp läget skiljer sig från den
((buttonCurrent [rad] ^ buttonState[row]) & (1 << index))) {/ / last fysisk knapp staten och nuvarande debounced staten
om (buttonCurrent [rad] & (1 << index)) {/ / om nuläget fysisk knapp trycks
buttonEvent [rad] = 1 << index; köa upp en ny knapp händelse omedelbart
buttonState [rad] | = (1 << index); och ställa in debounced ner.
}
annat {
buttonDebounceCounter [rad] [index] = 12.
} / / annars knappen tidigare var deprimerad och nu
har släppts så vi våra debounce counter.
}
annars om (((buttonCurrent [rad] ^ buttonLast[row]) & (1 << index)) == 0 & & / / om det aktuella fysiska knapp läget är samma som
(buttonCurrent [rad] ^ buttonState[row]) & (1 << index)) {/ / den senaste fysiskt knappen stat men den nuvarande fysiskt
knappläge skiljer sig från den nuvarande debounce
statliga...
om (buttonDebounceCounter [rad] [index] > 0 & &--buttonDebounceCounter [rad] [index] == 0) {/ / om den räknaren debounce har
varit minskas till 0 (menande den
knappen har varit upp i
kButtonUpDefaultDebounceCount
iterationer / / /
buttonEvent [rad] = 1 << index; köa en knapp staten change-händelse
om (buttonCurrent [rad] & (1 << index)) {/ / och växla knapparna debounce staten.
buttonState [rad] | = (1 << index);
}
annat {
buttonState [rad] & = ~ (1 << index);
}
}
}
}
{Ogiltig shift()
för (jag = 0; jag < 4; i ++) {
buttonLast [i] = buttonCurrent [i];
byte dataToSend = (1 << (jag + 4)) | (15 & ~ ledData[i]);
ställa in spärren pin låg så lysdioderna inte ändra samtidigt skickas i bitar
PORTD & = B10111111; //digitalWrite (ledLatchPin, låg);
flytta ut bitarna av dataToSend
shiftOut (ledDataPin, ledClockPin, LSBFIRST, dataToSend);
för (j = 0; j < 8; j ++) {
PORTD & = B11011111;//digitalWrite(ledClockPin,LOW);
digitalWrite (ledDataPin, ((dataToSend >> j) & 1));
om ((dataToSend >> j) & 1) {
PORTD| = B10000000;
}
annat {
PORTD & = B01111111;
}
PORTD|=B00100000;//digitalWrite(ledClockPin,High);
}
ställa in spärren pin hög så lysdioderna kommer att få nya uppgifter
PORTD| = B01000000; //digitalWrite (ledLatchPin, hög);
Avmattningen sätts i här slösa bort lite tid medan vi väntar på statligt av produktionen
Pins sedimentera. Utan denna tid slösa slinga, skulle en enda knapptryckning dyka upp som
två pressar (knappen och dess granne)
flyktiga int avmattning = 0;
medan (avmattning < 15)
{
Avmattningen ++;
}
När en rad har ställts in hög, ta emot data från knappar
ställa in spärren pin hög
PORTD| = B00010000; //digitalWrite (buttonLatchPin, hög);
skifta i data
buttonCurrent [i] = shiftIn (buttonDataPin, buttonClockPin, LSBFIRST) >> 3.
för (j = 0; j < 4; j ++) {
PORTD & = B11110111;//digitalWrite(buttonClockPin,LOW);
PORTD|=B00001000;//digitalWrite(buttonClockPin,High);
}
för (j = 0; j < 4; j ++) {
PORTD & = B11110111;//digitalWrite(buttonClockPin,LOW);
om ((PIND >> 2) & 1){//digitalRead(buttonDataPin)
buttonCurrent [i] | = 1 << j;
}
annat {
buttonCurrent [i] & = ~ (1 << j);
}
PORTD|=B00001000;//digitalWrite(buttonClockPin,High);
}
latchpin låg
PORTD & = B11101111; //digitalWrite (buttonLatchPin, låg);
för (k = 0; k < 4; k ++) {
buttonCheck(i,k);
}
}
stänga av lysdioder - detta sätt en rad inte visas ljusare än resten
ställa in spärren pin låg så lysdioderna inte ändra samtidigt skickas i bitar
PORTD & = B10111111; //digitalWrite (ledLatchPin, låg);
flytta ut 0
shiftOut (ledDataPin, ledClockPin, LSBFIRST, 0);
för (j = 0; j < 8; j ++) {
PORTD & = B11011111;//digitalWrite(ledClockPin,LOW);
PORTD & = B01111111;
PORTD|=B00100000;//digitalWrite(ledClockPin,High);
}
ställa in spärren pin hög så lysdioderna kommer att få nya uppgifter
PORTD| = B01000000; //digitalWrite (ledLatchPin, hög);
}
void checkFirstButton() {
för (byte en = 0; en < 4; a ++) {
om (buttonEvent[a]) {
för (byte b = 0; b < 4; b ++) {
om (buttonState [a] & (1 << b)) {
Växla firstPress variabel
firstPress = 0;
Visa nertryckta pixel
ledData [a] = buttonEvent [a];
lagra aktuell position
yPosition = a;
xPosition = 1 << b;
Återställ timers
timeX = 0;
timeY = 0;
hemkomst.
}
}
}
}
}
byte scaleAcc (int RAW) {
om (RAW < = 10 & & RAW > =-10) {
returnera 5.
}
annars om (RAW < -10) {
om (RAW < -50) {
Return 0;
}
annars om (RAW < -40) {
tillbaka 1.
}
annars om (RAW < -30) {
returnera 2.
}
annars om (RAW < -20) {
returnera 3.
}
annat {
returnera 4.
}
}
annars om (RAW > 10) {
om (RAW > 50) {
returnera 10.
}
annars om (RAW > 40) {
returnera 9.
}
annars om (RAW > 30) {
returnera 8.
}
annars om (RAW > 20) {
returnera 7.
}
annat {
returnera 6.
}
}
}
void checkAccelerometer() {
Läs värden
xGyroRAW = analogRead(A1);
yGyroRAW = analogRead(A0);
xAccRAW = analogRead(A4);
yAccRAW = analogRead(A3);
zAccRAW = analogRead(A2);
offset data
xGyroRAW = 317-xGyroRAW;
yGyroRAW = 183-yGyroRAW;
xAccRAW = 282-xAccRAW;
yAccRAW = 282-yAccRAW;
zAccRAW = 282-zAccRAW;
om (xAccRAW > 0) {
dirX = 1;
}
annat {
dirX = 0;
}
om (yAccRAW > 0) {
dirY = 1;
}
annat {
dirY = 0;
}
konvertera till 0-10
xAcc = scaleAcc(xAccRAW);
yAcc = scaleAcc(yAccRAW);
}
int getTime (byte acceleration) {
Växla (acceleration) {
fall 0: / / max - acceleration
returnera 25.
bryta;
fall 1:
returnera 25.
bryta;
fall 2:
gå tillbaka 50;
bryta;
fall 3:
gå tillbaka 100.
bryta;
fall 4:
returnera 150;
bryta;
fall 5: / / ligger platt
Return 0;
bryta;
fall 6:
returnera 150;
bryta;
fall 7:
gå tillbaka 100.
bryta;
mål 8:
gå tillbaka 50;
bryta;
mål 9:
returnera 25.
bryta;
mål 10: / / max + acceleration
returnera 25.
bryta;
}
}
void moveXPixel (int timeComp) {
om (timeComp == 0) {
}
annat {
om (timeX > timeComp) {
timeX = 0;
om (dirX) {
om (xPosition == 8) {
}
annat {
xPosition = xPosition << 1;
}
}
annat {
om (xPosition == 1) {
}
annat {
xPosition = xPosition >> 1;
}
}
}
}
}
void moveYPixel (int timeComp) {
om (timeComp == 0) {
}
annat {
om (timeY > timeComp) {
timeY = 0;
om (dirY) {
om (yPosition == 3) {
}
annat {
yPosition = yPosition + = 1;
}
}
annat {
om (yPosition == 0) {
}
annat {
yPosition = yPosition-= 1;
}
}
}
}
}
void checkMIDI() {
konvertera xPosition till decimal
växel (xPosition) {
fall 1:
AktuelltX = 0;
bryta;
fall 2:
AktuelltX = 1;
bryta;
fall 4:
AktuelltX = 2;
bryta;
mål 8:
AktuelltX = 3;
bryta;
}
om pixel har flyttat skicka midi
om (lastX! = AktuelltX || lastY! = yPosition) {
MIDImessage (noteON, (lastX + 5 * lastY + MIDIoffset), 0), //turn av sista anmärkning
MIDImessage (noteON, (AktuelltX + 5 * yPosition + MIDIoffset), velocity); //turn på nästa anteckning
}
lastX = AktuelltX;
lastY = yPosition;
}
void MIDImessage (int befalla, int MIDInote, int MIDIvelocity) {//send s ett MIDI-meddelande
Serial.write (kommandot); //send på eller av kommandot
Serial.write (MIDInote); //send pitch data
Serial.write (MIDIvelocity); //send hastighet data
}
void loop() {
om (firstPress) {
checkFirstButton();
}
annat {
för (byte pixel = 0; pixel < 4; pixel ++) {
om (pixel == yPosition) {
ledData [pixlar] = xPosition;
}
annat {
ledData [pixlar] = 0;
}
}
checkAccelerometer();
moveXPixel(getTime(xAcc));
moveYPixel(getTime(yAcc));
checkMIDI();
}
}
fyra pixlar studsande (använder bara x accelerometer, använder x gyro att rensa pixlar):
Accelerometer test-bounce
Amanda Ghassaei 2012
/*
* Detta program är fri programvara; Du kan vidaredistribuera det och/eller ändra
* det enligt villkoren i GNU General Public License som offentliggjorts av
* den Free Software Foundation; antingen version 2 av licensen, eller
* (på ditt alternativ) någon senare version.
*
*/
PIN-anslutningar
#define ledLatchPin 6
#define ledClockPin 5
#define ledDataPin 7
#define buttonLatchPin 4
#define buttonClockPin 3
#define buttonDataPin 2
installationsprogrammet för varibles för gyroskop/Accelerometer
int xGyroRAW;
int yGyroRAW;
int xAccRAW;
int yAccRAW;
int zAccRAW;
byte xGyro;
byte yGyro;
byte xAcc;
byte yAcc;
byte zAcc;
looping variabler
byte i.
byte j;
byte k;
lagring för ledde staterna, 4 byte
byte ledData [] = {0, 0, 0, 0};
lagring för knappar, 4 byte
byte buttonCurrent [] = {0,0,0,0}.
byte buttonLast [] = {0,0,0,0}.
byte buttonEvent [] = {0,0,0,0}.
byte buttonState [] = {0,0,0,0}.
knappen Dämpningstid counter - 16 byte
byte buttonDebounceCounter [4] [4].
variabler för accelerometer pixel rörelse
booleska firstPress [] = {0, 0, 0, 0};
byte movingPixel [] = {0, 0, 0, 0};
byte xPosition [4].
int timeX [] = {0, 0, 0, 0};
booleska dirX;
booleska dirY;
booleska prevDirX = 0;
booleska bounceDirection [] = {0, 0, 0, 0};
Boolean växla [] = {1, 1, 1, 1};
byte peakHeight [4].
byte lastX = 4;
byte lastY = 4;
MIDI-variabler
int hastighet = 100;
int noteON = 144;
int MIDIoffset = 60.
byte AktuelltX;
byte Observera [] = {60, 64, 67, 72};
void setup() {
DDRD = 0xFA; //set stift D7-D4 som D2 som indata-utdata
Serial.BEGIN (31250); //MIDI överföringshastighet
(CLI); //stop avbrott
Ställ in timer1 avbrott vid 1kHz
TCCR1A = 0; / / Ställ in hela TCCR1A register till 0
TCCR1B = 0; / / samma för TCCR1B
TCNT1 = 0, //initialize counter värde till 0.
ställa in timer räknas 1khz steg
OCR1A = 1999. / / = (16 * 10 ^ 6) / (1000 * 8) - 1
Aktivera CTC läge
TCCR1B | = (1 << WGM12);
Ange CS11 bit för 8 prescaler
TCCR1B | = (1 << CS11);
Aktivera timern jämför avbrott
TIMSK1 | = (1 << OCIE1A);
SEI (); //allow avbrott
}
ISR(TIMER1_COMPA_vect) {//Interrupt på freq 1 kHz
för (byte en = 0; en < 4; a ++) {
timeX [a] ++; //increment varje beståndsdel av timeX
}
Shift();
}
buttonCheck - kontrollerar status för en viss knapp.
denna buttoncheck funktion är i stort sett kopierade från monome 40h firmware brian crabtree och joe sjö
void buttonCheck (byte rad, byte index)
{
om (((buttonCurrent [rad] ^ buttonLast[row]) & (1 << index)) & & / / om det aktuella fysiska knapp läget skiljer sig från den
((buttonCurrent [rad] ^ buttonState[row]) & (1 << index))) {/ / last fysisk knapp staten och nuvarande debounced staten
om (buttonCurrent [rad] & (1 << index)) {/ / om nuläget fysisk knapp trycks
buttonEvent [rad] = 1 << index; köa upp en ny knapp händelse omedelbart
buttonState [rad] | = (1 << index); och ställa in debounced ner.
}
annat {
buttonDebounceCounter [rad] [index] = 12.
} / / annars knappen tidigare var deprimerad och nu
har släppts så vi våra debounce counter.
}
annars om (((buttonCurrent [rad] ^ buttonLast[row]) & (1 << index)) == 0 & & / / om det aktuella fysiska knapp läget är samma som
(buttonCurrent [rad] ^ buttonState[row]) & (1 << index)) {/ / den senaste fysiskt knappen stat men den nuvarande fysiskt
knappläge skiljer sig från den nuvarande debounce
statliga...
om (buttonDebounceCounter [rad] [index] > 0 & &--buttonDebounceCounter [rad] [index] == 0) {/ / om den räknaren debounce har
varit minskas till 0 (menande den
knappen har varit upp i
kButtonUpDefaultDebounceCount
iterationer / / /
buttonEvent [rad] = 1 << index; köa en knapp staten change-händelse
om (buttonCurrent [rad] & (1 << index)) {/ / och växla knapparna debounce staten.
buttonState [rad] | = (1 << index);
}
annat {
buttonState [rad] & = ~ (1 << index);
}
}
}
}
{Ogiltig shift()
för (jag = 0; jag < 4; i ++) {
buttonLast [i] = buttonCurrent [i];
byte dataToSend = (1 << (jag + 4)) | (15 & ~ ledData[i]);
ställa in spärren pin låg så lysdioderna inte ändra samtidigt skickas i bitar
PORTD & = B10111111; //digitalWrite (ledLatchPin, låg);
flytta ut bitarna av dataToSend
shiftOut (ledDataPin, ledClockPin, LSBFIRST, dataToSend);
för (j = 0; j < 8; j ++) {
PORTD & = B11011111;//digitalWrite(ledClockPin,LOW);
digitalWrite (ledDataPin, ((dataToSend >> j) & 1));
om ((dataToSend >> j) & 1) {
PORTD| = B10000000;
}
annat {
PORTD & = B01111111;
}
PORTD|=B00100000;//digitalWrite(ledClockPin,High);
}
ställa in spärren pin hög så lysdioderna kommer att få nya uppgifter
PORTD| = B01000000; //digitalWrite (ledLatchPin, hög);
Avmattningen sätts i här slösa bort lite tid medan vi väntar på statligt av produktionen
Pins sedimentera. Utan denna tid slösa slinga, skulle en enda knapptryckning dyka upp som
två pressar (knappen och dess granne)
flyktiga int avmattning = 0;
medan (avmattning < 15)
{
Avmattningen ++;
}
När en rad har ställts in hög, ta emot data från knappar
ställa in spärren pin hög
PORTD| = B00010000; //digitalWrite (buttonLatchPin, hög);
skifta i data
buttonCurrent [i] = shiftIn (buttonDataPin, buttonClockPin, LSBFIRST) >> 3.
för (j = 0; j < 4; j ++) {
PORTD & = B11110111;//digitalWrite(buttonClockPin,LOW);
PORTD|=B00001000;//digitalWrite(buttonClockPin,High);
}
för (j = 0; j < 4; j ++) {
PORTD & = B11110111;//digitalWrite(buttonClockPin,LOW);
om ((PIND >> 2) & 1){//digitalRead(buttonDataPin)
buttonCurrent [i] | = 1 << j;
}
annat {
buttonCurrent [i] & = ~ (1 << j);
}
PORTD|=B00001000;//digitalWrite(buttonClockPin,High);
}
latchpin låg
PORTD & = B11101111; //digitalWrite (buttonLatchPin, låg);
för (k = 0; k < 4; k ++) {
buttonCheck(i,k);
}
}
stänga av lysdioder - detta sätt en rad inte visas ljusare än resten
ställa in spärren pin låg så lysdioderna inte ändra samtidigt skickas i bitar
PORTD & = B10111111; //digitalWrite (ledLatchPin, låg);
flytta ut 0
shiftOut (ledDataPin, ledClockPin, LSBFIRST, 0);
för (j = 0; j < 8; j ++) {
PORTD & = B11011111;//digitalWrite(ledClockPin,LOW);
PORTD & = B01111111;
PORTD|=B00100000;//digitalWrite(ledClockPin,High);
}
ställa in spärren pin hög så lysdioderna kommer att få nya uppgifter
PORTD| = B01000000; //digitalWrite (ledLatchPin, hög);
}
void checkPress(byte Y) {
om (buttonEvent[Y]) {
för (byte b = 0; b < 4; b ++) {
om (buttonState [Y] & (1 << b)) {
Växla firstPress variabel
firstPress [Y] = 1;
Visa nertryckta pixel
ledData [Y] = (1 << b);
lagra aktuell position
xPosition [Y] = (1 << b);
lagra topphöjden
peakHeight [Y] = (1 << b);
Återställ timers
timeX [Y] = 0;
hemkomst.
}
}
}
}
byte scaleAcc (int RAW) {
om (RAW < = 10 & & RAW > =-10) {
returnera 5.
}
annars om (RAW < -10) {
om (RAW < -50) {
Return 0;
}
annars om (RAW < -40) {
tillbaka 1.
}
annars om (RAW < -30) {
returnera 2.
}
annars om (RAW < -20) {
returnera 3.
}
annat {
returnera 4.
}
}
annars om (RAW > 10) {
om (RAW > 50) {
returnera 10.
}
annars om (RAW > 40) {
returnera 9.
}
annars om (RAW > 30) {
returnera 8.
}
annars om (RAW > 20) {
returnera 7.
}
annat {
returnera 6.
}
}
}
void checkAccelerometerGyro() {
Läs värden
xGyroRAW = analogRead(A1);
yGyroRAW = analogRead(A0);
xAccRAW = analogRead(A4);
yAccRAW = analogRead(A3);
zAccRAW = analogRead(A2);
offset data
xGyroRAW = 317-xGyroRAW;
yGyroRAW = 183-yGyroRAW;
xAccRAW = 282-xAccRAW;
yAccRAW = 282-yAccRAW;
zAccRAW = 282-zAccRAW;
konvertera till 0-10
xAcc = scaleAcc(xAccRAW);
yAcc = scaleAcc(yAccRAW);
om (xAccRAW > 5) {
dirX = 1;
}
annars om (xAccRAW < 5) {
dirX = 0;
}
om (yAccRAW > 5) {
dirY = 1;
}
annars om (yAccRAW > 5) {
dirY = 0;
}
}
int getTime (byte acceleration) {
Växla (acceleration) {
fall 0: / / max - acceleration
gå tillbaka 100.
bryta;
fall 1:
gå tillbaka 100.
bryta;
fall 2:
returnera 150;
bryta;
fall 3:
returnera 200.
bryta;
fall 4:
returnera 250;
bryta;
fall 5: / / ligger platt
Return 0;
bryta;
fall 6:
returnera 250;
bryta;
fall 7:
returnera 200.
bryta;
mål 8:
returnera 150;
bryta;
mål 9:
gå tillbaka 100.
bryta;
mål 10: / / max + acceleration
gå tillbaka 100.
bryta;
}
}
void moveXPixel (byte Y, int timeComp) {
om (timeComp == 0) {
}
annat {
om (timeX [Y] > timeComp) {
timeX [Y] = 0;
om (dirX) {
om (peakHeight [Y] == 8 & & xPosition[Y]==8) {
IF(Toggle[Y]) {
MIDImessage (noteON, Obs [Y], 0); //send midi
växla mellan [Y] = 0;
ledData [Y] = 0;
}
annat {
MIDImessage(noteON,note[Y],velocity);
växla mellan [Y] = 1;
}
}
annat {
växla mellan [Y] = 1;
om (xPosition[Y]==peakHeight[Y]) {//if på topp
bounceDirection [Y] = 1; //falling
MIDImessage (noteON, Obs [Y], 0); //turn anmärkning av
}
om (xPosition[Y]==8) {//if slår botten
bounceDirection [Y] = 0; //rising
MIDImessage (noteON, Obs [Y], velocity); //turn anteckning på
}
om (xPosition[Y]==1) {
bounceDirection [Y] = 1;
}
om (bounceDirection[Y]) {
xPosition [Y] = xPosition [Y] << 1;
}
annat {
xPosition [Y] = xPosition [Y] >> 1;
}
}
}
annat {
om (peakHeight [Y] == 1 & & xPosition[Y]==1) {
IF(Toggle[Y]) {
MIDImessage (noteON, Obs [Y], 0); //send midi
växla mellan [Y] = 0;
ledData [Y] = 0;
}
annat {
MIDImessage(noteON,note[Y],velocity);
växla mellan [Y] = 1;
}
}
annat {
växla mellan [Y] = 1;
om (xPosition[Y]==peakHeight[Y]) {//if på topp
bounceDirection [Y] = 0; //falling
MIDImessage (noteON, Obs [Y], 0); //turn anmärkning av
}
om (xPosition[Y]==8) {
bounceDirection [Y] = 0;
}
om (xPosition[Y]==1) {//if slår botten
bounceDirection [Y] = 1; //rising
MIDImessage (noteON, Obs [Y], velocity); //turn anteckning på
}
om (bounceDirection[Y]) {
xPosition [Y] = xPosition [Y] << 1;
}
annat {
xPosition [Y] = xPosition [Y] >> 1;
}
}
}
}
}
}
void shake2Clear() {
om (abs(xGyroRAW) > 300) {
för (byte en = 0; en < 4; a ++) {
firstPress [a] = 0;
ledData [a] = 0;
}
}
}
void MIDImessage (int befalla, int MIDInote, int MIDIvelocity) {//send s ett MIDI-meddelande
Serial.write (kommandot); //send på eller av kommandot
Serial.write (MIDInote); //send pitch data
Serial.write (MIDIvelocity); //send hastighet data
}
void loop() {
checkAccelerometerGyro();
shake2Clear();
för (byte kolumn = 0; kolumnen < 4; kolumn ++) {
checkPress(column);
om (firstPress[column]) {
moveXPixel (kolumn, getTime(xAcc));
om (toggle[column]) {
ledData [kolumn] = xPosition [kolumn].
}
}
}
}

Använda LEGO Mindstorm RCX ljussensor med Arduino (Program med Visuino)

Genom att använda Pimoroni Display-O-Tron med arduino

Använda playstation remote på pc med arduino
DH11 Temperatur och luftfuktighetsgivare med Arduino

Helgen projektet klocka datum termometer och luftfuktighet med Arduino mega

En trådlös Smart Home (var: hem simulator och larm med Arduino eller Atmega328 (Uppdaterad maj 2016))

Använda Switcheroo slå på ljuset med din smartphone

Använda en USB-Barcode Scanner med en iPad

Använda frys papper och en skrivare att göra ram-stånd konst (och en återanvändbar utskrivbara stämpel)

Kolla fuktighet, temperatur och daggpunkt med Arduino
Använda Dragino han och mega328p för att bygga en likadan lösning för Arduino Yun

Hur man ladda ner och använda Spotify på en dator med Windows

Använda alternativa noll och justering lasrar med handibot

En svävar sfär roterar lyser och blinkar med Arduino

Mest använda Motor enheter och dess användningsområden

Använda XML på Raspberry Pi med Python

Använda Si4703 FM Breakout styrelsen på Arduino Uno

Untethered taligenkänning och syntes med Arduino
