Arduino, gyroskop och bearbetning (3 / 4 steg)
Steg 3: programvara


Bearbetning koden:
import processing.serial.*;
import cc.arduino.*;
Arduino arduino;
int ledPin = 13.
flyta värde = 0;
int first_try = 1;
Sträng stf = "";
void setup()
{
size(400,400);
println(Arduino.list());
Arduino = nya Arduino (detta, Arduino.list()[1]);
arduino.pinMode (ledPin, Arduino.OUTPUT);
frameRate(60);
Delay(500);
}
flyta sens = 0.512;
float offset = 316;
flyta count = 0;
float valor = 0;
flyta aux1 = 0, aux2 = 0;
int [] contador = {
0,0,0}.
flyta first_time, tid.
flyta teta = 0;
void draw() {
Background(150);
Fill(250,250,250);
Arc(200,200,100,100,0,TWO_PI);
IF(first_try==1) {
fördröjning för arduino initiering
Delay(2000);
first_try = 0;
}
om (mousePressed == true) {
Fill(255,0,0);
AUX1 = 0;
AUX2 = 0;
Contador [0] = 0;
Contador [1] = 0;
Contador [2] = 0;
TETA = 0;
arduino.digitalWrite (ledPin, Arduino.HIGH);
}
annat {
Fill(0,0,0);
arduino.digitalWrite (ledPin, Arduino.LOW);
}
//####################################################################//
// //
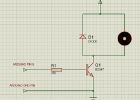
Gyro / /
Skala Factor 2.5mV / / s = 0.512 räknas / / s / /
Kompensera 316 räknas = 1562mV = 1.562V / /
ADC 4,88 mV/räkna / / 0.2048 count/mV / /
// //
//####################################################################//
Count = 0;
för (int jag = 0; jag < 20; i ++) {
antal = antal + arduino.analogRead(0);
}
antal = antal /20;
Valor = (räkna - offset) / sens;
tid = millis ()-first_time;
first_time=Millis();
TETA = teta + valor * tid/1000;
om (teta > -1 & & teta < 1) teta = 0; undvika drift fel
PFont teckensnitt;
Font = loadFont("EngraversMT-48.vlw");
STF = str(teta);
textFont(font);
text(STF,150,270,200,200);
println ("teta:"+ teta +"count:"+ count +"tid:"+ tid +"valor:" + tapperhet);
line(200,200,50*cos(radians(TETA+270))+200,50*sin(radians(TETA+270))+200);
}

Med en NES-kontrollant för emulatorer med Arduino och bearbetning

Låt oss laga: 3D skanner baserat på Arduino och bearbetning

Hastighetsmätare med hjälp av Arduino och bearbetning

TV KONTROLLERBAR fjärrdatorn MP3 spelare använder ARDUINO och bearbetning

GY-521 MPU6050 3 axel gyroskop och Accelerometer med Arduino
Snabba kontroll av dc-motor från laptop använder arduino och bearbetning

Hur man gör en fjärrkontroll kännande web-docka av hacka Twitter, Google, Skype, Arduino och bearbetning!
Arduino och bearbetning interagera.

Taktila tangentbord / game controller med Arduino och bearbetning

Kontroll RGB LED med arduino och bearbetning.

Mynt samlare med Arduino och bearbetning

Kör en webbsida i realtid med hjälp av Arduino, SensorMonkey och Processing.js

Foto resistor kontrollerade arduino pong med bearbetning

Arduino tid-och-Sensor-baserade Android musikspelare
Arduino Microcontroller och dess olika tillämpningar

PC mus gjorda med Arduino Uno och Joystick

Styra åtkomsten till din låsa distans med Arduino, SensorMonkey och RF modul

Kyl övervakning med Arduino MKR1000 och thethings.iO
