Arduino roboten flytta framåt och bakåt med hjälp av HC-SR04 och L293D (2 / 3 steg)
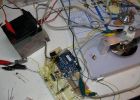
Steg 2: anslutningar






Det är viktigt att förstå användningen av L293D dual H-bridge Motor driver.
Som ni kan se i bilden finns anslutning för två motorer (stift 3,6 (motor A1) och 11,14 (motor A2) därmed). Så ansluter motorerna till dessa stift och beroende av arduino skiss rotera medsols eller motsols. Men för att kontrollera deras hastighet du har att använda stift 1 aktivera för motor A1 och pin 9 aktivera för motor A2 och förse dem med spänningar från arduino analoga utgående stift. Detta är också ett sätt att kalibrera förflyttning av roboten eftersom motorerna är inte av bästa kvalitet och en är oftast snabbare än den andra.
För strömförsörjningen om du använder ett batteri av mer än 6V måste du använda en spänningsregulator 7805 som ger dig en konstant 5V spänning att leverera arduino, L293D och HC-SR04. Som ni kan se från den schematiska pin1 input pin2 i marken och pin3 är 5V utgång.
Om du är osäker eller rädd att du kan bränna något är det bättre att leverera arduino med sin regelbundna 9V batteri och ger 5V från arduino till L293D och HC-SR04 och bara ge olika strömförsörjning till motorerna.
Vänligen kontrollera att L293D ansluter till två nätaggregat, stift 16 (Vs +) som behöver 5v för chip och pin 8 (Vss +) som skickar ström till motorerna och kan styra mer makt (upp till 24V som ni kan se i datablad här). L293D är ganska segt och jag har inte lyckats förstöra en ännu, som med annan elektronik men det är bättre att studera anslutningar innan börja ansluta den med verkliga spänningar.
Så innan du ansluter något studera scheman för L293D, HC-SR04, L7805, fritzing diagrammet och arduino ide koden.

Mångsidig Arduino roboten

Översikt Arduino skiss belastande upp processen och ISP

Xmas-box: Arduino/ioBridge internet kontrollerad Julljus och musik show
Arduino insikt-nybörjare lysdioder och (binära counter 16 bit)

Programming AVR med Arduino som ISP utan bootloader och externa crystal

Gå av i soffan, med Arduino, 3d tryckta inhägnad och programmerade med Embrio

Bygga en XBMC/KODI remote med Arduino, IR-Sensor sköld och VB.NET

Arduino, Temp, fuktighet, WiFi, MySQL och Highcharts

Arduino Nano: Loggar GPS-Information till MicorSD kort med Visuino

Programmerbar robotbil med Mediatek LinkIt en bräda och L293D Motor Driver IC

JabberBot! Arduino roboten med en ATMega hjärnan och bluetooth braun! :-)

Penna Tricks - tummen Spinning, framåt och bakåt

Mobile Robotics med repa: bygga en Arduino-baserad insekt-liknande Walker och programmera den med Scratch

Kissa Timer: Ansluta Arduino, Intel perceptuella Computing kameran och en Dränkbar vattenpump

Bitars banka steg för steg: Arduino kontroll av WS2811, WS2812 och WS2812B RGB lysdioder

Styra en arduino projekt genom en anpassningsbar android / Iphone app med Blynk och Wemos D1: 2016 SUPER NOOB VÄNLIGT sätt
BLDC Motor Control med Arduino, bärgades HD motor och hallgivare

Hem larm eller rörelsedetektor med Arduino,P.I.R Sensor och LCD.
