Åtgärd RPM - optisk varvräknare (8 / 10 steg)
Steg 8: Förklaring och beräkning
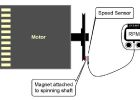
Programmet övervakar i princip mot IR-sensorn värde hela tiden och med högsta prioritet med avbryter.
Arduino Uno har 3 avbrott avbrott 0 är stift 2 på arduino.
attachInterrupt (0, RPMCount, RISING);
Denna linje fäster ett avbrott till stift 2 på arduino i "Stigande" läge. Detta innebär att när sensorn går från låg till hög, funktionen RPMCount(); åberopas.
Detta innebär att i en revolution, funktion kommer att anropas två gånger ( REV ++ ). Därför actualREV = REV / 2.
RPM = 30*1000/(millis() - tid) * REV;
För att beräkna den faktiska RPM, behöver vi den tid det tar för en revolution. Och (millis() - tid) är den tid det tar för ett fullt varv.
I detta fall, låt t vara den tid det tar för en fullständig revolution, så det totala antalet rotationer RPM i 60 SEK ( 60 * 1000 millisekund ) är:
RPM = 60 * 1000 / t * actualREV = > rpm = 60 * 1000 / (millis() - tid) * REV/2
ELLER rpm = 30 * 1000 / (millis() - tid) * REV;

Arduino-baserad optiska varvräknare

DIY Digital RPM varvräknare | RPM Counter med Arduino

Läst RPM från Arduino-baserad IR-varvräknare med MATLAB GUI

Linkit en bärbara varvräknare Noncontact

Varvräknare
Varvräknare från en cykel hastighetsmätare (cykeldator)

Ljud kort varvräknare

Infraröd varvräknare med Arduino

Installera Speedway instrument microTach varvräknare på 2004-senare Harley-Davidson motorcykel
Rengör och Smörj en varvräknare kabel

Hur man öppnar en Honda CB/CX/GL stil varvräknare och hastighetsmätare

Hard Drive varvräknare för en stationär dator

Reparera en Motor cykel varvräknare nålen

Hur man installerar en varvräknare

DIY cykel varvräknare

Billigt och enkelt varvräknare (RPM Sensor) för borstad DC motorer
Digital hastighetsmätare, varvräknare & motorns temperatur display

Automobile varvräknare på en utombordare