Avståndet sensing ledade struktur (3 / 6 steg)
Steg 3: Steg 3: koden
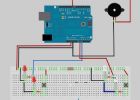
För kod som jag började med exempelkod för att testa ut varje enskild del först och sedan flyttade till min egna koder för att ange färgerna rött och grönt. Jag satte blå som en "annan" i koden så om ping inte har plocka upp signaler, standard skulle vara blå. Jag lade också till en seriell print linje så att jag kunde testa ping och se till att det var att plocka upp avstånd läsningar. Kom ihåg jag testat flera olika metoder för att gå om detta längs vägen så många saker är upp till anpassning, förändring eller saker som ska tas bort och ändras för att göra koden göra som du vill.
#include
ledde Schematisk inspirerad av adafruit exempel @ https://learn.adafruit.com/rgb-led-strips/schemat...
och konstruktören biblioteket på playground.arduino.cc
#define REDPIN
5 #define GREENPIN
6 #define BLUEPIN 3
#define RED_SHORT 0
#define RED_LONG 125
#define GREEN_SHORT 225
#define GREEN_LONG 75
#define FADESPEED 10 //speed
#define TRIGGER_PIN 13
#define ECHO_PIN 11
#define MAX_DISTANCE 200
NewPing sonar (TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
pinMode (REDPIN, OUTPUT);
pinMode (GREENPIN, OUTPUT); }
void loop()
{delay(1000);
unsigned int oss = sonar.ping();
Serial.Print ("Ping:");
int DIS = oss / US_ROUNDTRIP_CM;
Serial.Print(DIS);
Serial.println("cm");
int r, g, b;
om (31 > = DIS & & DIS > 0) {
blekna från rött till gult
för (g = 0, g < 256, g ++) {analogWrite (GREENPIN, g); delay(FADESPEED);}
blekna från gult till grönt
för (r = 255, r > 0, r--) {analogWrite (REDPIN, r); delay(FADESPEED);}
}
annat {b = 255; analogWrite(BLUEPIN,b);}}

Avståndet Alert

Avståndet mätanordning med automatiska larm

Hur magnetfält varierar med avståndet?

Avgöra hur magnetfält varierar med avståndet

Avståndet till vinkel arduino projekt

Avståndet controller för justerbar bordshöjd

Hur till hacka digital Infra Red växel att göra analoga IR-sensorn som avståndet

Avståndet detektor med summern och LED mätare.

Arduino Nano: Mät avståndet med ultraljud Ranger och logga in det MicroSD kort med Visuino
Dubbelriktad LED Sensing Try-out

Ledade kamera stativ

Hur man skapar 3d utskrivbara ledade skulpturer

Infrared närheten Sensing soffbord modul & färgskiftande glödande kran

Arduino avstånd sensorer

Soft-krets läge Sensing handske

Närhet-Sensing Bröstnäsdukar

Mäta vinklar och avstånd för utomhus överlevnad.

Nybörjare är ledad fotpall
