Bygga en puls Analyzer (5 / 8 steg)
Steg 5: Kod med kommentarer för puls analyzer (några anteckningar om nästa avsnitt!)

; Välj den p24FJ32GA002 processorn
.EQU __p24FJ32GA002, 1
; inkludera processor definitionerna
.include "p24FJ32GA002.inc"
;..............................................................................
; Configuration bits ;..............................................................................
config __CONFIG1 0x3f7f
config __CONFIG2 0x79cf
; Likställa register till namn som är lätt att använda.
.EQU ad1con1, 0x320; grundläggande ad kontroll registrera
.EQU ad1con3, 0x324; AD kontroll registrera för inställning av konvertering klockfrekvens
.EQU ad1buf0, 0x300; AD resultat hamna här
.EQU ad1chs0, 0x0328; AD kanal väljer register
.EQU ad1pcfg, 0x32c; Detta register användssom konfigurera ingångar för analog eller digital
.global __Återställ; Etiketten för den första raden i koden. ;
..............................................................................
; Kodavsnittet i programmet minne; (DETTA ÄR DÄR PROGRAMMET STARTAR EFTER ÅTERSTÄLLNING);...;
.text; Början av koden avsnitt
__Återställ:
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;; ; pin anslutning;;
-Utgång: RB4 pin11; Ingång: RA0 pin2
; UART: rx: pin6; TX: pin7
; AN9: pin26 S/H utgångar till detta stift (detta stift är en ingång för mikrokontroller)
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Anslutnin med UART2: översätta koden från serialcomm.pb för logochip
skriva $02c 8 $f0a4
MOV #0XF0A4, W0
MOV W0, TRISB
skriva $6c 2 $0500
MOV #0X0500, W0
MOV W0, RPOR1
skriva $6a6 $1f02
MOV #0X1F02, W0
MOV W0, RPINR19
skriva $238 51; Setting-överföringshastigheten
MOV #51, W0
MOV W0, U2BRG
skriva $230 $8800
MOV #0X8800, W0
MOV W0, U2MODE
skriva $232 $400
MOV #0X400, W0
MOV W0, U2STA
; initiera register
MOV #0x8200, W0
MOV W0, ad1con1; visar a/d, produktionen kommer att vara vänsterjusterade
MOV #6, W0
MOV W0, ad1con3; ca 4 cyklar per tad
MOV #0x1ff, W0
MOV W0, ad1pcfg; Ange 4 LC ingående portar till analog, vila till digital
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
BCLR TRISB, #4. ställa in till produktionen
AVSKILJS TRISA, #0; ta i signal från funktionsgenerator
AVSKILJS ad1pcfg, #0; Ange PIN-koden för att digital ingång
; LOOP1 & 2 kontroller är det är en stigande kanten LOOP:
AVSKILJS LATB, #4. GER EN UTSIGNAL: PROV
LOOP1: HANNAH PORTA, #0; HOPPA ÖVER OM NIVÅN ÄR HÖG
BRA LOOP1
NOP; VÄNTA EN KORT MÄNGD TID
NOP
BCLR LATB, #4. LÅGT INSTÄLLD START S/H: HÅLL
; gör en en A/D omvandling på AN9(pin 26)
MOV #9, W0
MOV W0, ad1chs0; Välj AN9 för a/d-omvandling
avskiljs ad1con1, #1. Starta provtagning och börja konvertera
MOV #7, W0; vänta 7 cyklar för interna prov och håll kondensatorn att debitera
cycledelay: dec W0, W0; dekrement W0
behå nz, cycledelay; nu vänta för konvertering till slut
bclr ad1con1, #1. börja hålla
gjort: Hannah ad1con1, #0;
bra gjort; vänta för konvertering göras
; vänsterjusterade resultat återfinns i ad1buf0
MOV ad1buf0, W0
LSR W0, #8, W0; flytta kopian av ad1buf0, skiftade 8 bitar till rätten att W0
MOV W0, U2TXREG; Skriv dessa 8 höga bitar till tx; vänta för överföring till slut
txdone: Hannah U2STA, #8.
bra txdone
MOV #0x0c0, W0; mask för att välja bitar 6 och 7
och #0x300, W0; och sätter kopia av bitar 6 och 7 i W0, alla andra bitar är noll
MOV W0, U2TXREG; skriver dessa bitar till tx, kom ihåg att behandla korrekt i MATLAB
LOOP2: BTSC PORTA, #0
BRA LOOP2; HOPPA ÖVER OM NIVÅN ÄR LÅG
BEHÅ LOOP

Bygga en LED Analyzer

Linkit en puls pulsmätare

Bygga en prop puls gevär (från kort)

Lätt att bygga Oxygen Analyzer använder en Arduino kompatibel Micro Controller

Nerf M41A puls gevär (bygger bort den filmen utlänningar)

PULS Tube bygga

Bygga en fusionsreaktor

DPScope SE - den enklaste riktiga oscilloskop/logik analyzer på planeten
DCF77 Signal Analyzer klockan

Bygga en Tricopter med Rotor bitar

Bygga en TENS maskin för att ta bort smärta

Bygga Blinquencer - en lätt kontrolleras slumpmässigt speldosa

Bygga en UAV bas
Bygga din egen FM-Radio Astronomy Lab

Bygga en 12V solenergi batteripack

Hur för att bygga 100 watt 12v DC till 220v AC inverter krets med EasyEDA

Dubbla puls kapacitiv ansvarsfrihet Spot Svetsare
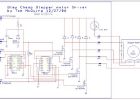
Lätt att bygga CNC Mill Stepper Motor och Driver kretsar