CONTROL SERVO MOTOR med RÖRELSESENSOR (3 / 3 steg)
Steg 3: Kodning:-
#include servo myservo; skapar servo objekt //a högst åtta servo objekt kan vara createdint pos = 0; variabel att lagra servo position / / belopp av tid vi ger sensorn för att kalibrera (10-60 SEK enligt databladet)
int calibrationTime = 30. //the tid när sensorn utgångar en låg impulselong osignerade
int lowIn; millisekunder sensorn måste vara låg / / innan vi antar all rörelse har stoppedlong osignerade
int paus = 5000;
booleska lockLow = sant;
booleska takeLowTime;
int pirPin = 12; Digital pin ansluten till den PIR outputint pirPos = 13. ansluter till den PIR 5V pin
void setup() {
myservo.attach(4); fäster servo till nåla fast 4 Serial.begin(9600); börjar seriell kommunikation
pinMode (pirPin, ingång);
pinMode (pirPos, produktionen);
digitalWrite (pirPos, hög); ge tid att kalibrera sensorn
Serial.println ("kalibrera sensorn");
för (int jag = 0; jag < calibrationTime; i ++) {
Serial.Print(calibrationTime-i);
Serial.Print("-");
Delay(1000); }
Serial.println();
Serial.println("Done"); samtidigt att göra detta Instructable, hade jag vissa problem med den PIR produktion //going hög omedelbart efter kalibreringen //this väntar tills den PIR utgång är låg innan du avslutar setup
medan (digitalRead(pirPin) == hög) {
Delay(500);
Serial.Print("."); }
Serial.Print ("sensorn aktiv");}
void loop() {
IF(digitalRead(pirPin) == hög) {//if PIR produktionen är hög, aktivera servo / * vänder servo från 0 till 180 grader och tillbaka det gör detta genom att öka variabeln "pos" av 1 var 5 millisekunder tills den träffar 180 och välja servo är position i grader som "pos" var 5 millisekunder den sedan gör det i omvänt att det går tillbaka till lära sig mer om detta , google "för loopar" för att ändra mängden grader servo svängar, ändra antalet 180 för hur många grader det ska vända ** /
för (pos = 0; pos < 180; pos + = 1) //goes från 0 till 180 grader {//in steg av en grad
myservo.write(POS); berättar servo gå till position i variabel "pos" delay(5); väntar på servo att nå ställning}
för (pos = 180, pos > = 1; pos-= 1) //goes från 180 till 0 grader {
myservo.write(POS); för att göra servo gå fortare, minska tid förseningar för delay(5); för att gå långsammare, öka antalet. }
IF(lockLow) {//makes säker på att vi väntar på en övergång till låg innan ytterligare produktionen görs
lockLow = false;
Serial.println("---");
Serial.Print ("rörelse upptäckts på");
Serial.Print(Millis()/1000);
Serial.println ("sec");
Delay(50); }
takeLowTime = sant; }
IF(digitalRead(pirPin) == låg) {
IF(takeLowTime) {
lowIn = millis(); Spara tiden för övergången från hög till låg
takeLowTime = false; se till att detta görs endast i början av en låg fas} //if sensorn är låg för mer än given paus, //we kan anta förslaget har slutat
om (! lockLow & & millis() - lowIn > pausa) {//makes säker på detta block av kod körs endast igen efter //a nya förslag sekvens har upptäckts
lockLow = sant; Serial.Print ("motion slutade på"); utgång
Serial.Print((Millis() - paus) / 1000);
Serial.println ("sec");
Delay(50); } }
}
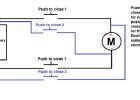
Control 2 Servo motorer med en vanlig fjärrkontroll

Hur man styr Servo motorer med en Arduino

Servo Motor sopa Mode säkerhetsloggar med Mediatek Linkit en stiger ombord

Gränsyta för motorer med Arduino

Posten kontrollerade parkering System med Servo Motor och PIR med LinkIt en styrelse

Snabba Controlled RC bil med (4 CH Motor Driver styrenhet + Arduino + Bluetooth)

Arduino & Visual Basic 6.0 (kontinuerlig Servo Motor)
Servo Motor Tester

Hur man kontrollerar DC-motorer med Arduino

Arduino, MIT app inventor servo motor controller

Styra DC motorer med MSP430 Launchpad

Control servo över bluetooth

Arduino Servo motorer

Arduino och ultrasonic sensor control servo och distans mätare

Curie-motor med ett mynt

Styra riktning och hastighet av DC-Motor med Raspberry Pi

Styra en Motor med avstånd ultraljudssensorer (HC-SR04)

Styra riktning och hastighet av en DC motor med LabVIEW och FPGA