Cykel norr indikator (6 / 10 steg)
Steg 6: Firmware

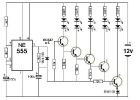
Piezo summern surrar automatiskt vid ~ 1Hz. Du kan ladda upp koden nedan om du vill höra den fulla surrande potentialen av summern.
#include < Wire.h >
#define Addr 0x1E / / 7-bitars adress HMC5883 compass
booleska Summer = 0;
lagring variabel för riktning
int x;
int y;
int z;
kalibrera dessa
int xVal =-185;
int yVal = 300;
int zVal =-115;
int tolerans = 90. //adjust att ändra känslighet
void setup() {
Wire.BEGIN();
Serial.BEGIN(9600);
Ställ in läge för kontinuerlig
Wire.beginTransmission(Addr);
Wire.write(byte(0x02));
Wire.write(byte(0x00));
Wire.endTransmission();
pinMode(7,OUTPUT);
}
void loop() {
Serial.Print("X=");
Serial.Print(x);
Serial.Print (", Y =");
Serial.Print(y);
Serial.Print (", Z =");
Serial.println(z);
Initiera kommunikation med kompass
Wire.beginTransmission(Addr);
Wire.write(byte(0x03)); Skicka förfrågan till X MSB register
Wire.endTransmission();
Wire.requestFrom (Addr, 6); Begäran 6 byte. 2 byte per axel
IF(Wire.available() < = 6) {/ / om 6 byte tillgängligt
x = Wire.read() << 8 | Wire.Read();
z = Wire.read() << 8 | Wire.Read();
y = Wire.read() << 8 | Wire.Read();
}
om (abs(xVal-x) < tolerans) {/ /
om (abs(yVal-y) < tolerans) {
om (abs(zVal-z) < tolerans) {
summern = 1;
}
annat {
summern = 0;
}
}
annat {
summern = 0;
}
}
annat {
summern = 0;
}
om (Summer) {
digitalWrite(7,HIGH);
}
annat {
digitalWrite(7,LOW);
}
Delay(500);
}
Jag hittade detta surrande att vara lite mycket så jag pulsade makt på och av att summern att tysta det lite. Se koden nedan:
#include < Wire.h >
#define Addr 0x1E / / 7-bitars adress HMC5883 compass
booleska Summer = 0;
lagring variabel för riktning
int x;
int y;
int z;
kalibrera dessa
int xVal =-185;
int yVal = 300;
int zVal =-115;
int tolerans = 90. //adjust att ändra känslighet
void setup() {
Wire.BEGIN();
Serial.BEGIN(9600);
Ställ in läge för kontinuerlig
Wire.beginTransmission(Addr);
Wire.write(byte(0x02));
Wire.write(byte(0x00));
Wire.endTransmission();
pinMode(7,OUTPUT);
}
void loop() {
Serial.Print("X=");
Serial.Print(x);
Serial.Print (", Y =");
Serial.Print(y);
Serial.Print (", Z =");
Serial.println(z);
Initiera kommunikation med kompass
Wire.beginTransmission(Addr);
Wire.write(byte(0x03)); Skicka förfrågan till X MSB register
Wire.endTransmission();
Wire.requestFrom (Addr, 6); Begäran 6 byte. 2 byte per axel
IF(Wire.available() < = 6) {/ / om 6 byte tillgängligt
x = Wire.read() << 8 | Wire.Read();
z = Wire.read() << 8 | Wire.Read();
y = Wire.read() << 8 | Wire.Read();
}
om (abs(xVal-x) < tolerans) {
om (abs(yVal-y) < tolerans) {
om (abs(zVal-z) < tolerans) {
summern = 1;
}
annat {
summern = 0;
}
}
annat {
summern = 0;
}
}
annat {
summern = 0;
}
om (Summer) {
digitalWrite(7,HIGH);
Delay(100);
digitalWrite(7,LOW);
}
Delay(500);
}
LED bil / cykel tur indikator

Cykel tur indikator från ryggsäck täcka

DIY natt cykel indikator

Pendling och Trail ridning cykel hjälm belysning lösning...

Hur man fångar, ren och koka norra Florida inomskärs fisk

Cykel som drivs vattenpumpen (Tuntipump)

Att hitta norr riktningen och tid av alla ljusa stjärna.

Elektrisk cykel laddare från menar väl strömförsörjning

Blinky cykel en ljus system för cyklar

Cykel mekaniker översikt

Över 7000 lumen cykel ljus

Smart telefon cykel Touring

Swing ljus: en cykel drivs glödande swing
Att hitta norr och tid av stjärnor i tropikerna

Duck tape två personer cykel

LEDify din cykel lampor!

Cykel 3W Led Retro strålkastare
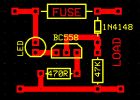
Blåst säkring indikator krets med Led
