Fjärrstyrda Racing svävare (10 / 12 steg)
Steg 10: Program

• Installera Arduino programvara.
• Anslut din Arduino ombord med datorn med USB-kabeln. Fungera programvaran på din dator.
• A mark "check" visas när du ansluter Arduino styrelsen till din dator. Kontrollera om du har installerat motsvarande enhet på datorn på ett korrekt sätt.
• Ladda upp dina koder till Arduino styrelsen.
• Om du har lagt upp koderna, programvaran kommer att ge kommentaren: "ladda upp framgångsrikt". Om inte prova igen.
Koder för att styra svävare:
#include < Servo.h >
Servo myservo;
Servo rudderservo;
int ppm1 = 2;
int ppm2 = 3;
float spd, dir;
osignerade långa rc1_PulseStartTicks, rc2_PulseStartTicks;
flyktiga int rc1_val, rc2_val;
void setup() {
Serial.BEGIN(9600);
PPM ingångar från RC mottagare
pinMode (ppm1, ingång);
pinMode (ppm2, ingång);
attachInterrupt (0, rc1, förändring);
attachInterrupt (1, rc2, förändring).
myservo.attach(5);
rudderservo.attach(6);
rudderservo.write(90);
}
void rc1()
{
förändrades den PIN-kod till hög eller låg?
om (digitalRead (ppm1) == hög)
rc1_PulseStartTicks = micros(); lagra aktuell micros()
annat
rc1_val = micros() - rc1_PulseStartTicks;
}
void rc2()
{
förändrades den PIN-kod till hög eller låg?
om (digitalRead (ppm2) == hög)
rc2_PulseStartTicks = micros();
annat
rc2_val = micros() - rc2_PulseStartTicks;
}
void loop() {
SPD = karta (rc1_val, 956, 1876, 10, 180);
dir = karta (rc2_val, 1040, 1912, 60, 120);
Serial.Print ("kanal 1:");
Serial.Print(rc1_val);
Serial.Print("");
Serial.println(SPD);
Serial.Print("");
Serial.Print ("kanal 2:");
Serial.println(rc2_val);
Serial.println(Dir);
Serial.println();
myservo.write(SPD);
rudderservo.write(Dir);
}

Racing svävare
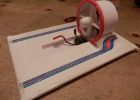
R/c racing svävare, 2 kanal

Del ett, en bra grund att bygga ett fack bil spår -
Skylanders födelsedagsfest

Tillverka en huvudsakliga Hoop för en störtbåge

Fjärrstyrd svävare. av AnTiProcrastination

Bygga en elektrisk racing bil

Hur man gå spearfishing och vara säkert och ansvarsfullt

Hur man rida raceing cykel seaftly

Hur till Mod NERF Zombie Strike Doublestrike Blaster vara handled-monterad

COOKIE MONSTER RACING hjälm

Bygga en Mini Racing Quadcopter för £50

DIY Bluetooth kontrollerad svävare

DIY FPV Racing Drone

DIY Modular & omvandlingsbara FPV Racing Quadcopter!

Arcade Racing installationsprogrammet för XBOX 360

Fjärrstyrda konfetti kanoner

PMod Racing linjalen!
