Fjärrstyrda roboten genom att använda Arduino (3 / 6 steg)
Steg 3: anslutningar:

1. pin 4, 5, 12 och 13 från L293D Chip ansluta till marken
Stift 1, 9 och 16 från L293D Chip ansluta till 5 volt
2. pin 8 från L293D ansluter till 9 volt (positiv leda av batteri Pack)
3. pin 3 från L293D ansluter till höger Motor. Stift 6 från L293D till höger Motor. (Framåt och bakåt)
4. stift 11 från L293D ansluter till vänster Motor. Stift 14 från L293D till vänster Motor.
(Framåt och bakåt)
5. produktionen stift på Arduino att styra rätt Motor: stift 2 på L293D pin D8 på Arduino styrelsen och Pin 7 från L293D till stift D9 på Arduino styrelsen.
6. produktionen stift på Arduino att styra rätt Motor: Pin 10 på L293D pin D11 på Arduino styrelsen och Pin 15 från L293D till stift D12 på Arduino styrelsen.
7. jag har anslutit en power bank för att driva Arduino styrelsen.
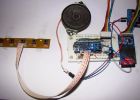
Om du använder en L293D modul som den som visas sedan ansluta stift D1, D2 och D3, utgångar D4 i modulen till respektive Arduino styrelsen stift (de ovan nämnda). Motorerna är anslutna till innehavare (M1, J3 och M2, J4). 5V pin är ansluten till Arduino styrelsen 5V pin och pin 12V till 9V batteri.
Spela Wave-fil genom att använda arduino

Generera slumptal genom att använda Arduino

Hur man gör FM-mottagare genom att använda Arduino
Kontrollera AC ljus genom att använda Arduino

Sund upptäckt RGB lampa genom att använda Arduino

Genom att använda Arduino för att kommunicera med inbäddade projekt

Enkel Wav spelare genom att använda Arduino

Automatisk järnvägen passerar genom att använda Arduino
Grafiska Kalkylatorn genom att använda Arduino

Bitcoin pris Ticker (nästan) från grunden genom att använda Arduino som ISP

Enkel Mac spratt genom att använda Arduino (uppdaterad 22/03/10)

Världsklocka i tyska genom att använda Arduino

YourDuino: HandBat - handhållen ultraljud Radar genom att använda Arduino

Ladda upp ny programvara till treenigheten genom att använda Arduino [Jak nahrát programvara gör Trinity pomocí Arduino]

Kortkommandon genom att använda Arduino

Kontrollera motorn genom att använda Arduino

EMI detektorn genom att använda Arduino

VÄXTHUSGASER, servrar RACK, akvarium och andra apparater temperatur handledare med SMS larmsystem genom att använda Arduino, itbrainpower.net 3G / GSM sköldar och 1WIRE temperaturgivare
