Garage parkering sensor (6 / 6 steg)
Steg 6: RX MODULE(CODE)


RX-KOD
/*
SimpleReceive
Denna skiss visar textsträngar som tagits emot med VirtualWire
Anslut mottagaren data stift till Arduino stift 11
*/
#include
#include
byte meddelande [VW_MAX_MESSAGE_LEN]; en buffert för att lagra inkommande meddelanden
byte messageLength = VW_MAX_MESSAGE_LEN; storleken på meddelandet
LiquidCrystal lcd (7, 6, 5, 4, 3, 2);
Variablerna globales:
char cad [100].
int pos = 0;
void setup()
{
LCD.BEGIN (20, 4); LCD-konfiguration, 4 línes 20 tecken cada una.
lcd.setCursor (0, 0);
LCD.write("booting");
Delay(1000);
POS = 0;
LCD.Clear();
LCD.write ("lastning kod").
Delay(1000);
POS = 0;
LCD.Clear();
LCD.write(".");
Delay(900);
LCD.write(".");
Delay(900);
LCD.write(".");
Delay(900);
POS = 0;
LCD.Clear();
LCD.write("Instructables");
Delay(900);
Serial.BEGIN(9600);
Serial.println ("enheten är redo");
Initialisera IO och ISR
vw_setup(2000); Bitar per sekund
vw_rx_start(); Starta mottagaren
}
void loop()
{
byte buf [VW_MAX_MESSAGE_LEN];
byte buflen = VW_MAX_MESSAGE_LEN;
int i;
int k = VW_MAX_MESSAGE_LEN;
om (vw_get_message (buf, och buflen)) / / icke-blockerande
{
Serial.Print ("fick:");
för (int jag = 0; jag < buflen; i ++)
{
Serial.write(BUF[i]);
}
Serial.println();
}
om (vw_get_message (buf, och buflen))
{
IF(POS < 4)
lcd.setCursor (0, pos);
annat
{
POS = 0;
LCD.Clear();
}
LCD.write("Distance:");
för (jag = 0; jag < buflen; i ++)
{
LCD.write(BUF[i]);
POS ++;
}
LCD.write("cm"); / / CM eller INC
}
}
Ultrasonic Garage parkering Assistant med Arduino och en ATtiny85

Enkel parkering Sensor

Linkit en parkering Sensor
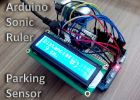
Animerade Sonic linjalen / parkering Sensor använder Arduino

Hur man bygger en parkering sensor för att lösa smärtan av att hitta en gratis plats

Arduino Wireless parkering Sensor

Parkering Sensor med Bluetooth

Parkering sensor!

Hur man gör en Arduino Ultra ljud bil parkering Sensor

Automatisk garage parkering stöd

Däck-tråd Garage parkering körfält

Flera cykel Garage parkering

Ultraljuds parkering Sensor

Avståndet detektor med summern och LED mätare.

ChipKIT parkering hinder Sensor

Arduino ultraljud "Parkering Spotter"

Arduino - Ultrasonic Sensor med lysdioder och Summer

Distansera mätningen och hinder detektering med NXP 89v51rd2fn och ultrasonic sensor HC-SR04.
