Hur man programmerar en PIC mikrokontroller & läsa en kodare (7 / 7 steg)
Steg 7: Kör programmet & felsökning


Kontrollera encoder värdet: För att kontrollera värdet encoder, måste du lägga till en variabel "titta" på panelen på vänster sida av fönstret MPLAB IDE. Klicka där det står "Enter ny klocka" och skriv antingen riktning eller avstånd. Du kommer sedan att kunna spåra dessa variabler genom fönstret. Observera att programmet måste vara paus om du vill se värdena i den variabla klocka förändringen. Ytterligare, om värdet i variabeln klockan visar upp i ett felaktigt format, högerklicka på felaktigt värde och sväva över "Display värdekolumnen som" så att du kan välja rätt format.
Projekt komplett!
Om du har nått slutet och inte har ett fungerande projekt oroa dig inte. Det finns ett antal saker att prova:
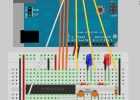
Multimeter: Kontroll för att säkerställa att din microcontroller & motor/encoder är mottagning + 5 v och + 0V (marken) på lämpliga platser
Oscilloskop: Kontrollera att din kodaren skickar signaler som de visas i oscilloskop bilden är associerade med detta steg. Kodaren bör lägga ut två fyrkantsvågor, från de gula och vita trådar, som är 90 grader ur fas.
MPLAB X: Kontrollera att din mikrokontroller är inställt korrekt genom att se till att kassorna särskilda funktion har korrekt binära värden (som i koden från steg 6). För att se den speciella funktionen register gå till fönster > PIC minne visningar > SFRs efter paus under en felsökningssession. Därifrån kan du kontrollera för att se att den PIN-kod med INT0 (PIN-kod 33) ligger som underlag, till exempel genom att hålla markören över TRISB registret.
Kommentarer: Om du inte kan lösa problemet eller har frågor/kommentarer om denna handledning vänligen lämna ett svar i kommentarerna och jag svarar glatt.
Hur man programmerar en PIC 18F2550 eller 18f4550 med Arduino UNO

Hur man programmerar ATtiny85 med Arduino uno styrelsen

Hur man programmerar Arduino Pro Mini använder Arduino Uno och ArduShield - utan kablar

Hur man programmerar ATtiny2313

Hur man programmerar en LilyPad utan FTDI Converter

Hur man programmerar en kö med Martin M2PC

Hur man programmerar ATtiny85 med Raspberry Pi?

Hur man programmerar en servo med arduino

Hur man programmerar Arduino marker under LPT med c ++ kod?

Hur man programmerar en Arduino Uno till Blink

Hur man programmerar Attiny85/45 med parallellport?

Hur man väljer en mikrokontroller

Hur man programmerar en ATtiny 85 Digispark
Hur man programmerar en klocka

Hur man programmerar använder MSW logotyp
Hur man programmerar en AVR (arduino) med en annan arduino

Hur man programmerar en Arduino accelerometer för motion kontroller

Hur man enkelt testa en mikrokontroller med en logik Analyzer
