Konfigurera Endstops på ramper 1.4 med Marlin firmware - @section homing





Detta kommer att vara en, förhoppningsvis, komplett handledning om hur du konfigurerar endstops på 3D-skrivare bygga på ramper 1.4 med Marlin firmware.
Jag kommer att använda Pronterface/upplagor värdprogram för att ansluta till min skrivare och fråga terminal kommandon (G-koder). Det lät mycket håriga, men det är bara ett enkelt program med ett grafiskt gränssnitt.
Även om jag kommer att använda ramper 1.4 och Marlin firmware, vara denna tutoral kommer sannolikt användbara för de flesta konfigurationer. Vi kommer att använda den nyaste Arduino IDE för att redigera Marlin firmware.
Konfigurera endstops ofta kokar ner till att vara metodisk i att hitta fel, varför det är som orsakar så många problem för många människor, så många hoppas de kan och försöka, bara koppla in skrivaren och hoppas att det fungerar. Vilket det sällan gör.
Om det inte fungerar kan det vara frestande att göra något utslag hopp om en snabb lösning, som i sin tur tenderar att förvärra frågorna och göra det mycket värre.
Gemensamma symptons av felaktig endstops är motorer/axlar som vägrar att flytta, flytta i fel riktning eller flytta en smula detta och sedan så.
Kort sagt: ställer in endstops korrekt rekommenderas inte bara, men är obligatoriskt innan du börjar konfigurera rörelse, inklusive homing - inställningar för axlarna.
i den här guiden vi:
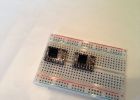
- Explorer fysiska Ändstopp
![]()
ramper 1.4 ombord.- Ansluta 2 och 3 pin endstops.
- Hämta Ändstopp status och konfigurera Marlin firmware homing med hjälp av Pronterface och den nyaste Arduino IDE
- Allt gjort. Redo för motion konfiguration.


Motion konfiguration på ramper 1.4 med Marlin firmware @section maskin

Hur du använder MAX6675 termoelement förstärkare med RAMPER 1.4 och Marlin
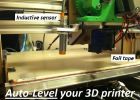
Aktivera automatisk utjämning för din 3D-skrivare med en induktiv (Marlin Firmware)
Installera och konfigurera SilentStepStick i RAMPER - TMC2100 Schrittmotortreiber

Gör passiva Ramp Walker leksaker med bindemedel klipp och trä pluggen

Konfigurera XBox 360-handkontrollen till arbeta med Fönstren och källa

Förvandla en billigt RC sändare med Custom Firmware

$3 Bluetooth HID-modul (HC05 med RN42 Firmware)

Konfiguration av MKS Sbase v1.2 32-bitars Controller grunderna och intro till Smoothieware.

Hur man ställer in RAMBo för skrivaren 3D

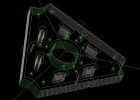
Detaillierte Bauanleitung für Rostock Mini Kossel 3D Delta Drucker - HKBay.com

Konfigurera hem Remote för användning med zmote

Hur man skapar en stor 3D-skrivare med en mindre 3D skrivare - "Projekt Locus"
En låg kostnad 3D skrivare med grundläggande verktyg

Komplett nybörjare steg för steg, 3D-skrivare med alla delar listor
Göra en 3D-skrivare med en CNC router - "Deltabot"
Installera och konfigurera DRV8825 Stepper drivrutiner

Konfigurera och använda Reprap Ramps1.4 RRD Fan Extender
