Kontroll robotarm med handskar, Android-telefon och Arduino (4 / 5 steg)
Steg 4: Arduino skiss

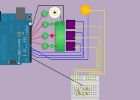
Som visas nedan är koden så enkel. Faktiskt, någon även som är ny i att använda Arduino kan få den.
Allt vi har att deklarera stiften för 4 PWM för varje servo och sedan mappa värdet av sensorn från (0 till 180) som är hela regionen servo kan rotera.
#include < OneSheeld.h >
#include < Servo.h >
Servo myservo1;
Servo myservo2;
Servo myservo3;
Servo myservo4;
void setup()
{
OneSheeld.begin();
myservo1.attach(3);
myservo1.write(90);
myservo2.attach(5);
myservo2.write(0);
myservo3.attach(6);
myservo3.write(180);
myservo4.attach(9);
myservo4.write(15);
}
void loop() {
om (ToggleButton.getStatus ())
myservo2.write(120);
annat
myservo2.write(0);
IF(OrientationSensor.getZ() > 0 & & abs(OrientationSensor.getZ()) < = 83 & & GravitySensor.getZ() > 0)
myservo1.write(Map(OrientationSensor.getZ(),0,90,90,0));
IF(OrientationSensor.getZ() < 0 & & abs(OrientationSensor.getZ()) < = 83 & & GravitySensor.getZ() > 0)
myservo1.write(Map(ABS(OrientationSensor.getZ()),90,0,180,90));
IF(OrientationSensor.getY() < 0 & & OrientationSensor.getY() > = -90 & & abs(GravitySensor.getZ()) > = 2,5)
myservo4.write(Map(ABS(OrientationSensor.getY()),0,90,15,105));
IF(OrientationSensor.getY() > 0 & & OrientationSensor.getY() < = 50 & & abs(GravitySensor.getZ()) > = 2,5)
myservo4.write(Map(ABS(OrientationSensor.getY()),0,50,15,0));
IF(OrientationSensor.getX() > 0 & & OrientationSensor.getX() < = 180 & & abs(GravitySensor.getZ()) > = 2,5)
myservo3.write(Map(ABS(OrientationSensor.getX()),0,180,180,0));
}

Kontroll robotarm med handskar, Android-telefon och Intel Galileo (uppdaterad)

Hur man styr arduino ombord med en android-telefon och en bluetooth-modul

Mitt åttonde projekt: Robotarm med smarta Tank chassi och Bluetooth

DIY RC Robot med din Android telefon handledning Del1: från Android telefon till mikrokontroller
DIY Smart rummet ljust System med PIR rörelsesensor och Arduino

Öppna din dörr med en speciell knock med Arduino, Android-telefon och 1Sheeld

Programmera en Arduino på språng med din Android-telefon eller surfplatta

Gör en trådlös Robot med en Android-telefon

Kompakt Home automation modul baserad på Android, Bluetooth och Arduino!

Bokstavera tillgivenhet för din Valentine med choklad, lysdioder, Attiny13 och Arduino IDE
Skapa din egen Simon Says game med DIY Electro degen och Arduino!

Kloning min förstärkare IR fjärrkontroll (och andra) med ett logiskt analyzer och Arduino

Komma igång med avstånd sensorer och Arduino

Polisens blixtljus med scanner rgb lysdioder och Arduino
DIY RC Robot med din Android telefon handledning del 2: Bluetooth/Microcontroller delar & ledningar

Hur att styra TV fungerar med Analog ingång och Arduino

Med PCF8574 ryggsäckar med LCD-skärmar och Arduino
Skapa en Casey Neistat time-lapse med en smart telefon och laptop
