Kvittrande Laser Tripwire med Webcam fånga (6 / 6 steg)
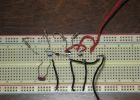
Steg 6: Nu kör den.
Nu ska allt vara redo att gå!
Kör den bearbetning skissen och kontrollera din twitter och webcam arkivplats för resultatet.
Något är upp med nedladdningar av filer.
Så är här koden, igen.
#------------------------
# twitter.trip
#------------------------
#! / bin/bash
User = "användarnamn"
passera = "lösenord"
resa = $(datum + "%A %b %d, % l: %M %p ')
stat = "laser trippade:" $trip
URL = http://twitter.com/statuses/update.xml
resultat ='curl -u $user: $pass -d-status = "$stat" $url "
#save webcam pic
webbkamera
datum + "%A %b %d, % l: %M %p ' > /home/username/someplace
//------------------------
bearbetning av kod
//------------------------
import processing.serial.*;
Seriella myPort;
char inBuffer;
int vänta nu, timeout = 10000;
booleska håll = false;
void setup() {
size(200,200);
println(Serial.list());
myPort = ny följetong (denna, Serial.list() [0], 9600);
Fill(#36ff00);
}
void draw() {
samtidigt (myPort.available() > 0)
{
inBuffer = myPort.readChar();
IF(inBuffer=='1')
{
om (! hålla)
{
Fill(#FF0000);
println("tripped");
Open("/Home/username/someplace/Twitter.Trip");
vänta = millis();
Håll = sant;
}
}
}
nu = millis();
om (nu > (vänta + timeout))
{
Håll = false;
Fill(#36ff00);
}
rect(0,0,200,200);
}
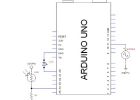
//------------------------
Arduino kod
//------------------------
int ledPin = 13.
int analogPin = 0;
int ldrVal = 0;
int tröskel = 500.
void setup()
{
Serial.BEGIN(9600);
pinMode (ledPin, produktionen);
digitalWrite (ledPin, hög);
}
void loop()
{
ldrVal = analogRead(analogPin);
om (ldrVal > tröskel)
{
Serial.Print("1");
Delay(200);
}
}

Laser Tripwire med 4-siffriga 7 seg Display för räknar människor
2 minuters Laser Tripwire

Hacka din Snap kretsar med Frickin' Laser strålar! Bygga en Laser Tripwire och larm

Laser Tripwire larm

Arduino Laser Tripwire
Laser Tripwire

Laser tripwire Nerf sentry bomb

En annan Arduino Laser Tripwire

Flera Program Laser Tripwire Set - Video bruksanvisning!

DIY | Lätt Arduino Laser Tripwire säkerhetssystem!

Enkel laser Spirograph med retro ser fallet

Enkel och bärbar Laser Tripwire för under 2$

BOX BOET för fåglar med WEBCAM

Arduino - Laser Tripwire larmsystem

Hur man skapa Laser konst med en digitalkamera
Alfanumeriska laser projektor med arduino

Moire LASER effekt med en handgjord laser
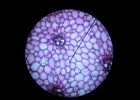
Mikroskop fotografering med webcam eller point-and-shoot kamera
