Laser show för fattige (2 / 9 steg)
Steg 2: hjärnan








Finns två arbete lägen, markerad med toogle: manuell och automatisk.
I manuellt läge kontrollerar operatören varje motor individuellt genom att vrida motsvarande potentiometer kopplad till analog ingång av mikrokontroller. PIC ständigt läser analoga ingångar och modifierar PWM signalen så tull värde är proportionell mot spänning på analog ingång.
I automatiskt läge sysselsätter mikrokontroller pseudo-slumpmässiga algoritm för att beräkna tull värde för varje motor.
Aktuella plikt värdet lagras i inre EEPROM och används som inledande data för nästa beräkning
så microcontroller kommer genererar sekvens av nonrepetitive unika mönster för lång tid.
De flesta pekare är klassade från 3V till 4.5V, så se till att du justera utspänning innan du ansluter laser.
Styrelsen är liten, så du inte behöver någon parentes att säkra det. Krukor att hålla det perfekt.
UPPDATERING OBS!
Eftersom min leverantör får slut på PIC18F1220, jag var tvungen att använda PIC18F1320 i ny design.
Det är pin-kompatibel chip med ökad minneskapacitet, men det fungerar inte med gamla HEX-filen
så var uppmärksam.
Jag håller PIC18F1220 version som separerad fil.
Här är några noteringar från bänken:
-Schematisk;
-BOM;
-HEX (PIC18F1320 version);
-PCB;
-PCB i AutoCAD-format
-källkod för CCS-kompilatorn.
Dokumentation zip-fil
Att programmera chip, jag använder USB-ICD2 programmerare (köpte den från eBay) och MPLAB IDE (fri mjuk från Microchip.com).
PCB innehåller mikrochip ICSP standardport (5-pins huvud) för programmering ändamål, även chip kan programmeras av alla socket programmerare med rätt programvara som stöder PIC18.
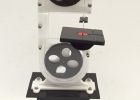
Styrkort montering (hög res guide):
...
För nybörjare och upptagna människor, programmerat chip, PCB, hela kitet, eller monteras ombord på begäran.
...
Några entusiaster föredrar förenklade analoga PWM controller baserat på 556 timer.

Laser Show!

Laser Show på pcDuino

Arduino Laser Visa (anpassad från NothingLabs' Instructable)

LaserTweet - Twitter projicera Laser Visa

Enkla Laser Visa

Arduino lasershow med Full XY kontroll
Spiral lasrar

Lasershow (av ariana mekaniskt del)
PRISVÄRDA LASER LIGHT SHOW

Diamond Ring Laser Light Show - SKYlasers Instructable

Baby Shower inbjudan med Laser skurna papper kuvert/ram

Lätt Laser Light Show

Personliga Wicked Laser Light Show

Laser Light Show

LED-nattlampa och Laser ljus Show med 4017 och 555.

Fattig mans blast utfärda utegångsförbud för laser avgassystem eller damm collector
Hur man gör en Mini Laser skär bandsåg

Cheapy lättare Laser brännare
