LeapTek: Leap Motion gränssnittet med MediaTek LinkIt en styrelse! (2 / 3 steg)
Steg 2: Mjukvara Setup!


1. Mediatek LinkIt en Setup:
- För det första du måste setup din MediaTek LinkIt en styrelse med Arduino IDE, så jag ber er att följa instruktionerna som finns i den officiella hemsida MediaTek Labs: http://bit.ly/1KcU66X
- När du har slutfört inställningen, kan du starta IDE och se till att du är ansluten till rätt COM-Port.
2. hoppa rörelse mjukvara Setup:
- För det första måste du hämta bearbetning IDE: [Ladda ner här]
- Nästa, du behov till installera språng motion biblioteket för bearbetning, för att göra detta:
- Klicka på skiss → importera bibliotek... → Lägg till bibliotek. Sedan Sök efter språng rörelse och installera biblioteket av Michael Heuer eller hämta det [här] och sedan lägga till biblioteket i din bearbetning skiss katalog ~/processing/libraries/
3. allmänna anvisningar:
- Nu kan du ladda ner LeapTek Arduino koden fäst här eller från min [Github databasen]
- Nästa måste du hämta den LeapTek Processing skiss fäst här eller från min [Github databasen]
- För det första, ladda upp den Arduino skiss till din MediaTek LinkIt en styrelse och sedan nästa ladda upp bearbetning skiss genom att redigera värdet för COM-porten i skissen.
Bearbetning källkoden:
/ * LeapTek: ansluta språng rörelsekontroll MediaTek LinkIt en styrelse
* Författare: Geeve George
* Instrubtables: < en href = " rel = "nofollow" >
*/
import com.leapmotion.leap.*; LEAP motion bibliotek
import processing.serial.*; seriell kommunikation bibliotek < /p >< p > Controller språng; definiera en controller
Seriell port;
void setup() {
size(250,250); skiss storlek
hoppa = nya Controller(); initiera registeransvarige
Port = ny följetong (här, "din COM PORT här", 9600); //initialize hamnen i mitt fall dess [2]
}
void draw() {
FingerList fingrar = leap.frame().fingers().extended(); finger lista man får räkna fingrar
int count = fingers.count(); heltal håller räkningen av fingrar
Background(0); rutan Bakgrundsfärg
Fill(255); textfärg
textSize(height/2); textstorlek
text (count, 90, 160); textvärdet och position på rutan
port.write(Count); Port skickar heltalet till arduino
}
Arduino källkoden:
< p > / * < br > * LeapTek: ansluta Leap rörelsekontroll MediaTek LinkIt en styrelse
* Författare: Geeve George
* Instrubtables:
* / < /p >< p > int ledone = 8;
int ledtwo = 10;
int ledthree = 11;
int c = -1; int för inkomst värdet < /p >< p > void setup()
{
Serial.BEGIN(9600); ställa in följetong med överföringshastigheten
pinMode(ledone,OUTPUT);
pinMode(ledtwo,OUTPUT);
pinMode(ledthree,OUTPUT);
} < /p >< p > void loop()
{
om (Serial.available() > 0) {//if vi har inkommande värde
c = Serial.read(); läsa av värdet minus 48
Serial.println(c);
IF(c == 0)
{
digitalWrite(ledone,LOW); om 0 fingrar stänger av lett
digitalWrite(ledtwo,LOW);
digitalWrite(ledthree,LOW);
}
annat if(c==1)
{
digitalWrite(ledone,HIGH);
digitalWrite(ledtwo,LOW);
digitalWrite(ledthree,LOW);
} < /p >< p > annat if(c==2)
{
digitalWrite(ledone,LOW);
digitalWrite(ledtwo,HIGH);
digitalWrite(ledthree,LOW);
} < /p >< p > annat if(c==3)
{
digitalWrite(ledone,LOW);
digitalWrite(ledtwo,LOW);
digitalWrite(ledthree,HIGH);
}
annat if(c == 5) {
digitalWrite(ledone,HIGH);
digitalWrite(ledtwo,HIGH);
digitalWrite (ledthree, hög), //if 5 fingrar slår på led
}
}
} < /p >

Gränsyta Närhetssensor med Mediatek Linkit en styrelse

Berömda LM35 med Mediatek Linkit en styrelse

Gränsyta Accelerometer ADXL 335 med Mediatek LinkIt en styrelse

Inbrotts larm med PIR-Sensor med Mediatek Linkit en styrelse

Servo Motor sopa Mode säkerhetsloggar med Mediatek Linkit en stiger ombord

Gränssnitt MPU6050 med MediaTek Linkit One

Gränssnitt TSOP1740 med Mediatek LinkIt en

Accelerometer samverkar med Mediatek Linkit en stiger ombord

Flow Rate mätning med Mediatek Linkit en stiga ombord

Gränssnitt BMP180 barometrisk Sensor med Mediatek Linkit en

Automatisk karuselldörr med Mediatek Linkit en
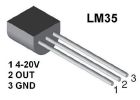
Digital termometer med LM35 med Mediatek LinkIt en bräda
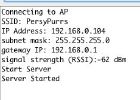
Kontroll av WiFi med Mediatek LinkIt en

Kontrollera din nuvarande plats med MediaTek LinkIT en

Programmerbar robotbil med Mediatek LinkIt en bräda och L293D Motor Driver IC

LPG / Biogas Detection System med MediaTek LinKIt en

En enkel hydroponiska System med MediaTek LinkIt™ en

Digital Object Counter med LDR gränssnitt med Mediatek LinkIt en
