Mätning av Acceleration med H3LIS331DL och Raspberry Pi (3 / 4 steg)
Steg 3: Python kod för acceleration mätning:

Han fördelen med raspberry pi är, det är ger dig flexibiliteten i det programmera språket som du vill programmera styrelsen för att gränssnittet sensorn med det. Utnyttja denna fördel av denna styrelse, visar vi här sin programmering i python. Python är ett av de enklaste programmeringsspråk med enklaste syntax. Python-koden för H3LIS331DL kan hämtas från vår github gemenskap som är Kontroll allt gemenskap.
Samt för att underlätta för användarna, förklarar vi koden här också:
Som ett första steg av kodning måste du hämta SMBus biblioteket vid python, eftersom detta bibliotek stöder funktioner används i koden. Så, om du vill ladda ner biblioteket kan du besöka följande länk:
https://pypi.python.org/pypi/SMBus-cffi/0.5.1
Du kan kopiera den arbetande koden från här också:
importera smbus
Importera tid
# Få I2C busbus = smbus. SMBus(1)
# H3LIS331DL adress, 0x18(24)
# Select-kontrollen register 1, 0x20(32)
# 0x27(39) Power ON mode, Data output ränta = 50 Hz # X, Y, z-axel aktiverad
Bus.write_byte_data (0x18, 0x20, 0x27)
# H3LIS331DL adress, 0x18(24) # Select-kontrollen register 4, 0x23(35)
# 0x00(00) kontinuerlig uppdatering, fullt skalutslag urval = +/-100g
Bus.write_byte_data (0x18, 0x23, 0x00)
Time.Sleep(0.5)
# H3LIS331DL adress, 0x18(24)
# Läs data tillbaka från 0x28(40), 2 byte
# X-axeln LSB, x-axeln MSB
Data0 = bus.read_byte_data(0x18, 0x28)
Data1 = bus.read_byte_data(0x18, 0x29)
# Konvertera dataxAccl = data1 * 256 + data0
om xAccl > 32767:
xAccl-= 65536
# H3LIS331DL adress, 0x18(24)
# Läs data tillbaka från 0x2A(42), 2 byte
# Y-LSB, y-axeln MSB
Data0 = bus.read_byte_data(0x18, 0x2A)
Data1 = bus.read_byte_data(0x18, 0x2B)
# Konvertera data
yAccl = data1 * 256 + data0
om yAccl > 32767:
yAccl-= 65536
# H3LIS331DL adress, 0x18(24)
# Läs data tillbaka från 0x2C(44), 2 byte
# Z-LSB, z-axel MSB
Data0 = bus.read_byte_data(0x18, 0x2C)
Data1 = bus.read_byte_data(0x18, 0x2D)
# Konvertera data
zAccl = data1 * 256 + data0
om zAccl > 32767:
zAccl-= 65536
# Utdata till skärm
skriva ut "Acceleration i x-axeln: %d" % xAccl
skriva ut "Acceleration i y-axeln: %d" % yAccl
skriva ut "Acceleration i z-axeln: %d" % zAccl
Koden genomförs med hjälp av följande kommando:
$> python H3LIS331DL.py
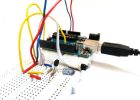
Produktionen av sensorn visas i bilden ovan för att hänvisa till av användaren.

Mätning av Acceleration med H3LIS331DL och Arduino Nano

Mätning av Acceleration med H3LIS331DL och partikel Photon

Temperatur och luftfuktighet övervakning med SHT25 och Raspberry Pi

Piano trappor med Arduino och Raspberry Pi
Läs/emulera fjärrkontroller med Arduino och Raspberry Pi

Galileo ramper: utforska hastighet och acceleration med marmor och lutande plan

Kör Linux Terminal på Windows med DHCP och Raspberry Pi

BrickPi Bookreader: Digitalisera böcker med Mindstorms och Raspberry Pi

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi

Trådlös 3D utskrift & övervakning med Astroprint och Raspberry Pi

Acceleration mätning med hjälp av BMA250 och Raspberry Pi

Ljus intensitet mätning med hjälp av BH1715 och Raspberry Pi

Magnetfält mätning med hjälp av HMC5883 och Raspberry Pi

Luftfuktighet mätning med hjälp av HYT939 och Raspberry Pi

Temperaturmätning med hjälp av STS21 och Raspberry Pi

Tryck mätning med hjälp av CPS120 och Raspberry Pi

Raspberry PI och DHT22 temperatur och luftfuktighet-logger med lampa och e-varningar

Temperaturövervakning med hjälp av MCP9808 och Raspberry Pi
