MICRO ARDUINO GOPRO TIMELAPSE DOLLY (4 / 5 steg)
Steg 4: kör




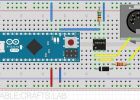
Dollyn kör med en modded nano servo.
Du kanna mod nästan alla servo för att vara en ändlös motor, genom att hugga en liten knopp inuti servo som mekaniskt skyddar servo från roterande över sina gränser. Och du måste också ta ut grytan och ersätta den med en lika uppskattad fasta motstånd.
Efter att du gjorde som kan du styra det med servo-protokollet som en normal servo.
Genom lödning två lika uppskattad motstånd i stället för potten, du berätta servo dess i mellanläge.
Hela tiden.
Så efter mod, när du säger att det ska gå för att placera 90°, det tycker att det redan är på denna position och gör ingenting.
Om du säger det att gå till 92° det inte full effekt motorn eftersom den (tror det) vet att dess enda 2° bort.
Som den aldrig når 92°, går det i denna hastighet för alltid.
Samma som du ger det ståndpunkten 180° den tror att dess 90° bort, så det befogenheter motor upp till max att nå denna position så snabbt som möjligt >> du få maximal hastighet.
Och allt däremellan, naturligtvis, och i omvänd riktning med värden lägre än 90° (ner till 0 °)

ARDUINO GOPRO TIMELAPSE SKÖLD

ARDUINO GOPRO TIMELAPSE REGLAGET

MICRO MIDI STEPPER touchOSC TIMELAPSE DOLLY

Magpi: Micro Arduino spel plattform-gränssnittet
MIDI till ARDUINO

Raspberry Pi drivs tid förflutit dolly (RasPiLapse)

Enkelklick på/av från din Android mobil med hjälp av Arduino och pfodApp. Arduino för nybörjare

Om The Arduino mikro

Arduino Wifi Temperaturlogger

Lägga till cableremote för Nikon D50

DYI kameramodul för UAV

Butch - Remote jord Monitor Watchdog

DIY Chewie Monsta (Ed Sheeran) Loop Pedal

Hur man gör hyperlapse

RoboCop pistol

Knappen låda för funktionshindrade

Traffic Light manschettknappar

DIY motoriserade glidande timelapse kamera dolly med Arduino
