Motorize IoT med ESP8266 (2 / 6 steg)
Steg 2: Motor sköld

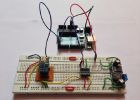
Presenterade motor skölden är tillverkad av Shenzhen läkare av intelligens & Technology (jag gillar namnet). Även om styrelsen är ganska fast och väl ändå ut tycker jag som dokumentation saknas. Styrelsen är ofta säljs stuvat i en WiFi robo bilsats för vilken programvara finns tillgänglig. Denna programvara är vad jag använde i stället för dokumentation. Men kunde inte jag hitta något om hur föraren med med stegmotorer. Förhoppningsvis sprida kommer detta instructable lite ljus i frågan.
I huvudsak motorn sköld funktioner:
- Fyra drivna utgångar styrs av NodeMCU IO 1, 2, 3 och 4
- Valfri dubbel spänning för motorer och NodeMCU
- Bekvämlighet breakout för alla relevanta stift
Motoreffekt stiften är märkta som A-, A +, B- och B +. I nodemcu och Arduino GPIO är inte mappad samma. Om du försöker använda D1 stiftet som io-stift 1 i Arduino IDE fungerar det inte. I Arduino du kommer att behöva använda D1 (som är ett alias till 5 eller bara 5. Stiften är mappade såhär:
| Styrelsen pin | | NodeMCU GPIO | | Arduino IDE |
|---|---|---|
| A- | 1 | 5 eller D1 |
| A + | 3 | 0 eller D3 |
| B- | 2 | 4 eller D2 |
| B + | 4 | 2 eller D4 |

Att skapa IoT enheter med ESP8266 och PubNub

Arduino IOT automation med ESP8266

Internet kontrollerad lampan med ESP8266 wifi relay IoT

Komma igång med ESP8266 ESP-12

Komma igång med ESP8266 på kommandon, NodeMCU eller Arduino (ESP-12naE)

Autonoma väderstation med ESP8266

BME280 väderstation med ESP8266 SDK

Akryl blad RGB glödande väderstation med inomhus/utomhus/prognos med ESP8266

MASLOW: ett öppet WiFi detektor med ESP8266

Nybörjare Video Tutorial-serien för IoT med Intel Edison (IntelIot)

IoT med LinkIt en - Servo

Digital termometer på OLED-display med ESP8266 ESP-12naE NodeMCU och DS18B20 temperaturgivare

IoT com ESP8266 - BSB FAB LAB

Med ESP8266-01 för temp övervaka

WiFi växel eller Smart kontakt med Esp8266, Attiny 85 & PIR-Sensor med android app

Skicka mail med ESP8266 och Arduino UNO
Nybörjarens guide till ESP8266 och tweeting med ESP8266

Arduino till Arduino kommunikation med ESP8266's
