RC kontroll och Arduino: A färdiga arbeten (2 / 10 steg)
Steg 2: Lär känna din radiosystem


http://www.RC-Airplane-World.com/RC-Transmitter-modes.html
Jag bestämde mig att gå med läge 3 eftersom det är lättare att komma ihåg där kanalerna mappas på sändaren. Jag behövde inte ändra någon standard på sändaren än kartläggning kanaler 5 till 8. Gå vidare och mappa dessa kanaler hur allt du gillar och om du bara har en 4-kanals radio oroa dig inte om det som jag inte gör stor nytta av de extra kanalerna. Välkommen att utforska rc-flygplan-world.com som den har en hel del bra information att lära sig att flyga ett rc plan eller heli. Jag också använder inte någon dual/inställningar och kommer att använda lager linjär kurvor.
Läge 3:
Vänster styrspak:
Kanal 1: skevroder
Kanal 2: hiss
Rätt pinne:
Kanal 3: Throttle
Kanal 4: roder
Om allt annat misslyckas bara koppla in servon till mottagaren och manuellt ta reda på hur din sändare ställs in.
Vi måste förstå de signaler som mottagaren kommer att ge oss och hur vi kan använda dem. Servon kommer i en mängd storlekar, motor stilar och intern kontroll. Analoga servon är de mest vanliga men digitala servon blir allt populärare eftersom de erbjuder mer uthållighet, är snabbare att reagera men förbrukar mer ström. Om du är osäker på vad du ska köpa låt plånboken bestämma eftersom både analog och digital servo kräver samma signal men bara har olika interna. Om du har tålamod kan du köpa behöva knockoff servon billigt på ebay men kommer att vänta en månad för leverans om du köper dem från Kina. Tänk på att kontinuerlig rotation servon är praktiskt att ha men inte är billiga. Jag köpte två standard servon och modifierade dem att arbeta som kontinuerlig rotation servon.
De flesta RC mottagare utgång en 50Hz signal till servon. Den minsta signal hänför sig till noll grader (om du har en 180 graders servo) är 1ms följt av 19ms döda utrymme. Ett högsta kommando för 180 grader är en puls av 2ms följt av 18ms av dead space. Om du inte förstår detta omedelbart är det inte ett problem eftersom du kan fortsätta läsa tills denna kunskap tas i praktiken senare. Under tiden om du Google "hobby servo fundamentals" du bör se en PDF-fil från Princeton som jag lärt från!

Säkerhetssystem och tillgång kontroll med Arduino och RFID-

KONTROLL STEPPER MOTOR hastighet med LABVIEW och ARDUINO

Kontroll DC och stepper motors med L298N Controller moduler med dubbla motorer och Arduino

Röd färg erkännande baserade Arduino kontroll (med hjälp av MATLAB och Arduino)
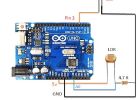
Auotmatic Street lights kontroll med hjälp av LDR och Arduino

Kontroll robotarm med handskar, Android-telefon och Arduino

Kompatibla proteshand med sensomotoriska kontroll och sensoriska Feedback för nacke amputerade

Google spelar musik Internet Radio (Raspberry Pi och Arduino)

Quiz Game Controller med hjälp av "Ljus och ljud Buzzers" och Arduino

Kontroll An Arduino med telefonen

Kraftfull kontroll med Arduino: Gränssnitt ett linjärt ställdon
Raspberry Pi och Arduino: bygga tillförlitliga system med WatchDog timer

Super Spooky onda LED ögon av Doom med atTiny85 och Arduino IDE

Bärbar prototyping labb med oscilloskop och arduino

MrRobot - Ubuntu Mobile app aktiverad Robotics (Raspberry Pi och arduino inblandade)

Kurs på MIT App Inventor och Arduino

Hur man gör en röststyrning, riktning, fjärrkontroll, Android och arduino robot, (3 i ett)

Bygga din egen pratar Tom leksak med skrapa och Arduino
