Sänka uppskov project(Arduino)









www.renanwebsites.com.br
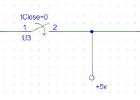
Detta är mitt första projekt med arduino, tanken är att fylla en påse med luft och kontrollera dess höjd från golvet, detta är ett projekt och kan användas i större skala, låt oss bara följa kopplingsschemat och överföra koden för Arduino:
komponenter:
1 x motor manometer mitsumi
1 x General purpose transistor (spets 31C)
1 x krockkudde (hjärt manometer)
1 x elektriska spjällfunktion
x x ledningar (tröjor)
4 tryckknappar
2 allmän diod (1N4407)
4 220 ohm motstånd
1 Arduino uno
1 set av brödunderläggen
kod:
/ * suspencao en ar
Criado por: Renan Rider
data: 08/01/2014
*/
int motor = 9.
int med = 8.
int button_ar = 7.
int button_valv = 6;
int button_ar_all = 5;
int button_valv_low = 4;
void setup() {
Serial.BEGIN(9600);
pinMode (motor, utgång);
pinMode (med, produktionen);
pinMode (button_ar, ingång);
pinMode (button_valv, ingång);
pinMode (button_ar_all, ingång);
pinMode (button_valv_low, ingång);
}
void loop() {
int estado_ar = digitalRead(button_ar);
int estado_valv = digitalRead(button_valv);
int estado_ar_all = digitalRead(button_ar_all);
int estado_valv_low = digitalRead(button_valv_low);
Serial.println(estado_ar);
Serial.println(estado_valv);
Serial.println(estado_ar_all);
Serial.println(estado_valv_low);
Delay(10);
IF(estado_ar == High) {/ / Gaboss o balao de ar por 3 segundos depois para
digitalWrite (med, hög);
digitalWrite (motor, hög);
Delay(3000);
digitalWrite (motor, låg);
}
IF(estado_valv == High) {/ / aciona en valvula de ar esvaziando o balao para ajustar en altura correta
digitalWrite (med, låg);
Delay(1000);
digitalWrite (med, hög);
digitalWrite (motor, låg);
}
IF(estado_valv_low == High) {/ / esvazia todo o balao abaixando en suspencao
digitalWrite (med, låg);
digitalWrite (motor, låg);
}
IF(estado_ar_all == High) {/ / aciona o motor enchendo o balao åt en altura maxima por 6 segundos depois manten en altura
digitalWrite (med, hög);
digitalWrite (motor, hög);
Delay(6000);
digitalWrite (motor, låg);
}
}
Video:
http://www.youtube.com/watch?v=Jg5-kPuDQrg

Arduino modulära analoga "Instant" kameran

Arduino stränginstrument
Radar (joystick kontroll) via Labview(+Arduino)

Hur du använder Arduino ISP Shield 2,0

Med hjälp av Arduino Uno till program ATTINY84-20PU

Skapa en DualShock 4 kontrollerade Arduino
Baserade Arduino akvarium gödselmedel Auto Doser

Styra Arduino från din iOS-enhet och din Apple Watch

Styra Arduino med python based web API (ingen php)

"Smart Shield" - bärbara larmsystem genom att använda Arduino

Hur man skriver en Ardulink GUI, till kontroll Arduino
Arduino + Push Switch + Debouncing + avbryter

Hur till vända din smartphone till en generisk sköld för Arduino

Hur man bygger din allt riktigt riktigt snabbt

RotaryX: Hur till hacka en Rotary telefon

Driva marionett automater

PiScope (Raspberry Pi baserat oscilloskop)

Använd en $1 ATTiny för att köra adresserbara RGB lysdioder
