Servomotor konverteras till motor (med hastighet & riktning kontroll) (2 / 4 steg)
Steg 2: Fastställande av potentiometer vinkeln



För det första, skruva loss de fyra skruvarna som förpackningar och ta bort den övre sidan av servo-motorn. Ta sedan bort alla de små redskap till potentiometern.
Några förklaringar:
Potentiometern är ett variabelt motstånd. Det ger till servo-drivrutinen en spänning som är bilden av redskap tåget kantiga ställning. Denna ståndpunkt är jämfört med vinkeln att nå och motor hastigheten är direkt proportionell mot skillnaden mellan de båda. Motoriska turn snabbt (i god riktning) när redskap tåget är långt borta från den riktade vinkeln, saktar det ner när det blir närmare och slutar när vinkeln nås.
Rektorn för detta Instructable består i att fastställa positionen för denna potentiometer i mellersta vinkel. När vi skickar en full vänster kommandot till servomotor, kommer att det vända snabbt i denna riktning (stor skillnad med potentiometer vinkeln). När vi kommer att skicka en fullständig rätt kommando, kommer att det göra samma sak i andra riktningen. Och när vi kommer att skicka ett mellersta vinkeln kommando, det kommer att sluta (ingen skillnad med potentiometer vinkeln). För mellanliggande kommandon, kommer vi få förmedlande hastigheter.
På grund av den fasta ståndpunkten potentiometerns, vinkel skillnaden för ett visst kommando blir alltid densamma och rotationshastigheten kommer att vara konstant.
För att fixa potentiometern ställning, koppla redskap tåget och flytta den vid mittläget, som visas på bilden. När det är gjort, Använd hot-melt lim applikatorn för att hålla det för att vara säker på att det aldrig kommer att flytta.
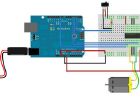
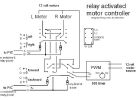
Anslut dc-motor med arduino och kontroll i vänster och höger

Styra riktning och hastighet av DC-Motor med Raspberry Pi

Styra riktning och hastighet av en DC motor med LabVIEW och FPGA

Kontroll DC och stepper motors med L298N Controller moduler med dubbla motorer och Arduino

Konvertera en NES gamepad till USB med Arduino

Konvertera en mountainbike till en enda hastighet cykel.
Hur konvertera blu-ray till avi med professionella blu-ray till avi converter?
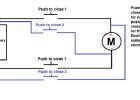
Hur till omvänd en DC-motor med hjälp av knapparna.

Kontroll av en DC motor med Arduino och Visual Basic

Konvertera YouTube-videor till MP3 med TheYouMp3

Gränsyta för motorer med Arduino

Använder en temperaturgivare som kontrollerar hastigheten på en motor med hjälp av arduino

Kör en CDROM Borstlös Motor med Arduino

Styrning av motorer med Arduino

5 minuters RC bil konvertering till litiumbatteri

Från filen till kniv (med enkla verktyg)

Arduino lasershow med Full XY kontroll

Styra en Motor med avstånd ultraljudssensorer (HC-SR04)