Solljus direktör (1 / 3 steg)
Steg 1: Mekaniska och elektriska installationen




A. den ljusstrålen setup:
-Solföljande arm (rörliga)
-Målet riktning arm (fast)
-Spegel (bifogas båda armarna lika långt från vridningspunkten)
Solföljande armen fixeras till pan/tilt basen. Som bas kastruller och lutar, kommer så solföljande arm. Target arm pekar på det objekt vi vill belysa. Denna arm fixeras på plats, så att den pekar alltid till våra målobjekt.
Spegeln är kopplad till båda armarna. Det har för att kunna glida in på någon av armarna, att upprätthålla på lika avstånd från pivot (se foto som visar en skåra i spegel-plattformen). Målet är att se till att spegeln är lika långt från pivot, oavsett vad vinkeln mellan armarna är - hitåt, ljuset kommer solföljande armen, och återspeglas längs mål armen. Spegeln har också vara vinkelrätt mot Plant två grenar.
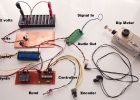
B. elektroniska Setup
Denna särskilda genomförandet använder följande komponenter:
1) Intel Edison mikrokontroller
2) Grove ljussensorer x 4
3) Grove sensor sköld
4) reläer x 4
5) Pan/Tilt kamera base (kan hämtas online http://www.mcmelectronics.com/product/82-12440?sc...
För detta projekt ger Intel Edison:
- WiFi-anslutning
- Analoga ingångar och digital GPIO
- Tillräcklig datorkraft att utveckla komplexa applikationer
De fyra sensorerna är ordnade i 2 x 2-matris, med en barriär som skiljer dem. I fyra kvadranter tillåter oss att veta hur att bättre positionera solföljande armen. Till vänster/höger beslut, vi sammanfatta ljus värden från givare 1 och 3 och jämföra resultatet med summan av 2 och 4. För upp/ner beslut, vi summera värden från givare 1 och 2 och jämföra resultatet med 3 och 4. Om den procentuella skillnaden är större än tröskelvärdet (5%), skickar vi en kommandot Flytta.
Sensorerna leverera mikrokontroller med information. Mikrokontroller beslutar om armen måste vara åter placerade. Rörelser utförs med en säkerhet kamera pan/tilt bas. Denna särskilda bas använder högspänning ingångar, så vi måste kontrollera AC aktuella med hjälp av reläer. Denna del av genomförandet är specifika för basen du använder. I vårt fall behövde vi två reläer per dimension. För varje dimension, först relä kontroller makt, andra relä kontroller riktning.

Moderna överlevnad metod för att rena vatten med solljus:

Spegel för att göra eld med solljus.

Klicketi-Clackety solljus vågmaskin

HDTv-antenn på en direkt TV-fäste.
En lärarhandledning till direkta instruktioner

Hem rättsmedel direkt från ditt kök

Gör det själv Bright solljus läsbar utomhus LCD-skärm

Konvertera min Mp3-spelare direkt USB-port och utbytbara batteri

Ändring av Pantum 2502W för direkt laserutskrifter av skrivaren kretskort

Ändring av laserskrivare Lexmark E260 för direkt laserutskrift för Double Sided kretskort
Byggnaden prusa i3 3D-skrivare med direkt extruder

Hur du ansluter ett elektronisk balans eller skala till en PC och Läs vikt värden direkt till Excel

Ändring av Lexmark E260 för direkt laserutskrifter av mönsterkort - MCU Version

Ändring av Lexmark E260 för direkt laserutskrifter av mönsterkort

Installera Windows 8 direkt från hårddisken – NO DVD eller USB behövs!

Installera Windows Vista direkt från hårddisken – NO DVD eller USB behövs!
Skapa en PCB direkt från en skärbräda

Direkt anslutning av två (gammaldags) modem eller telefon.