Sonifying kapacitiv Data över Serial Port med Teensy och SuperCollider (OSX och Linux) (3 / 4 steg)
Steg 3: Kör Teensy skissen och skicka seriella data

När du är igång med Teensy genom att hänvisa till: http://www.pjrc.com/teensy/td_download.html och några exempel program som körs, bör du vara redo att installera och köra den bifogade exempel skiss som tillhandahålls.
< p > //calibration < br > int avg_reading1, avg_reading2, avg_reading3, avg_reading4, avg_reading5;
int count_cal_readings = 0;
långa total1, total2, total3, total4, total5;
int cap_read1, cap_read2, cap_read3, cap_read4, cap_read5;
booleska done_cal = false;
använda
int touch_threshold;
debug
booleska debug;
int tval1, tval2, tval3, tval4, tval5;
int t_val1, t_val2, t_val3, t_val4, t_val5; < /p >< p > void setup() {
Felsöka = false;
Serial.BEGIN(9600);
done_cal = false;
touch_threshold = 0;
IF(debug==true) {
Serial.println("Starting...");
Delay(1000);
{} < /p >< p >} < /p >< p > void loop() {
cap_read1 = touchRead(A1);
cap_read2 = touchRead(A2);
cap_read3 = touchRead(A3);
cap_read4 = touchRead(A4);
cap_read5 = touchRead(A5);
IF(done_cal==true) {//RUNNING
Delay(10);
t_val1 = abs (cap_read1 - avg_reading1);
Delay(1);
t_val2 = abs (cap_read2 - avg_reading2);
Delay(1);
t_val3 = abs (cap_read3 - avg_reading3);
Delay(1);
t_val4 = abs (cap_read4 - avg_reading4);
Delay(1);
t_val5 = abs (cap_read5 - avg_reading5);
IF(t_val1 > touch_threshold) {
IF(debug==true) {
Serial.Print ("Raw touchRead data [");
Serial.Print(cap_read1); Serial.Print("");
Serial.Print(cap_read2); Serial.Print("");
Serial.Print(cap_read3); Serial.Print("");
Serial.Print(cap_read4); Serial.Print("");
Serial.Print(cap_read5);
Serial.println();
Serial.Print ("] \n");
Serial.Print ("Touch kalibrerade värde [");
Serial.Print(t_val1); Serial.Print("\t"); Serial.Print(t_val2);
Serial.Print("]\n");
} annat {
int tval1 = karta (t_val1, 1, 65536, 200, 1200);
int tval2 = karta (t_val2, 1, 65536, 200, 1200);
int tval3 = karta (t_val3, 1, 65536, 200, 1200);
int tval4 = karta (t_val4, 1, 65536, 200, 1200);
int tval5 = karta (t_val5, 1, 65536, 200, 1200);
Serial.Print(tval1); Serial.Print("");
Serial.Print(tval2); Serial.Print("");
Serial.Print(tval3); Serial.Print("");
Serial.Print(tval4); Serial.Print("");
Serial.Print(tval5);
Serial.println();
}
} annat {//CALIBRATION < /p >< p > if(millis() < 5000 & & done_cal == false) {//first fem sekunder, kalibrera
total1 += cap_read1;
total2 += cap_read2;
total3 += cap_read3;
total4 += cap_read4;
total5 += cap_read5;
count_cal_readings ++;
IF(debug==true) {
Serial.Print(cap_read1); Serial.Print("");
Serial.Print(cap_read2); Serial.Print("");
Serial.Print(cap_read3); Serial.Print("");
Serial.Print(cap_read4); Serial.Print("");
Serial.Print(cap_read5);
Serial.println();
}
} annat {
avg_reading1 = int(total1/count_cal_readings);
avg_reading2 = int(total2/count_cal_readings);
avg_reading3 = int(total3/count_cal_readings);
avg_reading4 = int(total4/count_cal_readings);
avg_reading5 = int(total5/count_cal_readings);
done_cal = sant;
IF(debug==true) {
Serial.println("~~");
Serial.println("AVG");
Serial.Print (avg_reading1 + "");
Serial.Print (avg_reading2 + "");
Serial.Print (avg_reading3 + "");
Serial.Print (avg_reading4 + "");
Serial.println(avg_reading5);
Serial.println("~~");
Delay(1000);
}
}
}
Delay(25); < /p >< p >} < /p >
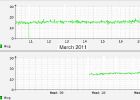
Observera att denna skiss kod har en kort kalibreringsfasen som det går igenom i initieringen av varje ny kör. Så för att få de mest exakta avläsningarna, dess ' alltid en god idé att ha dina händer utanför Teensy och kablar, och inte har kablarna röra marken eller metall när du först ansluter den. Om du anger flaggan DEBUG till true i skissen kan du se kalibreringsfasen i konsolen Arduino.
När kalibreringen är klar, kommer du då se omgivande numeriskt värden i rulla på skärmen. De faktiska touchRead värden kommer från Teensy är 16 bitar i storlek och sträcker sig från 1-65536 men jag har kartlagt produktionsvärden ner till en mer smal (mindre irriterande) hörbara frekvensområdet för 200-1200 i .ino skissen.

InPace - en Arduino baserad GPS-data logga fitness armband med bluetooth och en iOS app

Logger för Arduino över Serial Port
Online realtid geigermätare att övervaka radioaktivitetsnivåerna i luften. Med Arduino och Linux-dator.

Serial Port över WiFi

Power övervakning med Arduino och logga in i Google blad

Fyra bokstäver Word klocka med Akafugu ordet Generator och inspirerande fraser

Enkla Guitar Hero Controller för PC med Teensy (kapabel för flera spelare)

Kring låter feedback box-SSFBB (gjort med teensy)

Musikspelare med Teensy 3.1

Generera berättelse karaktär namn med Teensy

Om fastställande av Mac Lilypad USB Serial Port/Driver frågan

Data över ljus: en Laser Modem prototyp

Skicka SMS från Arduino över Internet med ENC28J60 och Thingspeak

Bearbetning av Data med RasPi och partikel (tidigare gnista)

ESP8266 och Visuino: fjärrstyra Servo över Wi-Fi med Rotary Encoder
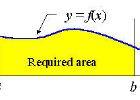
Hur man hittar området över ett intervall med hjälp av integraler.

IoT - kontrollera en Raspberry Pi Robot över internet med HTML och shell skript endast

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi
