Styra riktning och hastighet av en DC motor med LabVIEW och FPGA (1 / 4 steg)
Steg 1: Hardware design


För att styra riktning och hastighet för en DC-motor jag designar en H bro med kompletterande mosfet transistorer (IRF3205 + IRF4905) och för förare jag väljer MAX628 som tillhandahålls av Maxim integrerade.
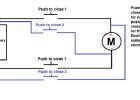
H bridge arbetet på detta sätt:
-den höga side P-kanal mosfet transistorer fungerar bara på/av;
-den låga sida N-kanal mosfet transistorer arbeta med 15 Khz PWM för varvtalsreglering.
Denna design tillåter att spänning upp till 30 V och en ström upp till 10 A (för mer aktuella bör du använda en kylfläns eller parallella mosfet transistorer).
Om du vill använda denna design på högre drift spänning bör du göra nästa förändringar:
-ändra alla mosfet transistorer med andra som har Vds kompatibel med spänning önskas;
-ändra LM7812 regulator eller leverera 12V på ett annat sätt eftersom denna spänning används för att tillhandahålla drivrutiner för mosfet transistorer och kan inte vara mer än 18V, eller riskerar du för att skada mosfet transistorer.
För att kontrollera motorn bör du göra detta steg:
-för att rotera på ett sätt, ingångarna kallas 1 och 4 behöva ställas in till 5 V (eller 1 logik) för maximal hastighet eller för hastighet kontrollera läge ingång 1 måste anges till 5 V (eller 1 logik) och ingång 4 får en PWM-signal med duty cycle variabel (ingångar 2 och 3 måste vara inställd på 0 logik eller jordad);
-för att rotera på andra sätt, ingångarna kallas med 2 och 3 måste anges till 5 V (eller 1 logik) för maximal hastighet eller för hastighet kontrollera läge ingång 3 måste anges till 5 V (eller 1 logik) och ingång 2 får en PWM-signal med duty cycle variabel (ingångar 1 och 4 måste vara inställd på 0 logik eller jordad);
-för bromsar motorn behöver du ställa in i underkant eller överkant mosfet transistorer till 5 V (eller 1 logik), men endast hög eller låg sidan, den andra ska vara inställd på 0 logik eller jordad. Denna metod kort går runt motorn och orsaka bromsen.

Styra riktning och hastighet av DC-Motor med Raspberry Pi

Servomotor konverteras till motor (med hastighet & riktning kontroll)

KONTROLL STEPPER MOTOR hastighet med LABVIEW och ARDUINO

Kontroll DC och stepper motors med L298N Controller moduler med dubbla motorer och Arduino

Styra en Motor med avstånd ultraljudssensorer (HC-SR04)

Styra DC motorer med MSP430 Launchpad

Kontroll av en DC motor med Arduino och Visual Basic

Kontrollera din motors med L293D och Arduino

1sheeld styra musikvolym och led bar med skjutreglaget

Hur man gör tangentbordet lösenord använder arduino att styra servo och ledde
Anslut dc-motor med arduino och kontroll i vänster och höger

Med LabVIEW LINX och chipKIT WF32 för att styra en LED Strip

Gränsyta för motorer med Arduino

Använder en temperaturgivare som kontrollerar hastigheten på en motor med hjälp av arduino

Kör en CDROM Borstlös Motor med Arduino

Styrning av motorer med Arduino

Hur man kör en DC Motor med Transistor - Arduino handledning
Hur till omvänd en DC-motor med hjälp av knapparna.
