Styra servon på FPGA (3 / 6 steg)
Steg 3: Hur koden fungerar


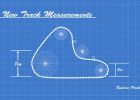
I min kod som jag har min topp modul, företrädd i bilden av den prickade square, ingångar som växlar, en knapp för tydliga och systemklockan.
Inom större topp modulen har jag en counter, kontrollapparat, växla till vinkel dekoder och vinkel till konstant värde på dekodern.
Räknaren tar in systemklockan och rensa. Varje klockcykel steg det ett antal värde tills den träffar en viss konstant värde. Detta värde är vad krävs för att få den lämplig frekvensen. Du kan hitta ekvationen för som kommenterade i koden. När den når värdet återställs. Så det räknas till konstant och sedan går tillbaka till noll. Detta styr frekvensen.
Växla till vinkel dekoder tar i en switch-värde och mappar det till en vinkel värde.
Vinkel dekodern tar i en vinkel värde och mappas till ett konstant värde som kommer att få lämplig intermittensen. Att ekvationen är också kommenterade i koden.
Motsvarigheten tar sedan i räkna värdet och konstant värde från vinkel dekodern. Om räkna värdet är mindre än konstanten än produktionen är 1, annars är produktionen noll. Detta skapar en PWM-signal.
Du kan se att illustreras i den andra bilden.
Om du vill använda vinkeln som indata i stället för växlarna kan du ta bort växeln för att vinkla dekoder. Om du vill använda mer än en servo, kan du instansiera flera servo controller moduler i en högre topp modul.

Styra servon med hjälp av SSC-32 Servo Controller och Arduino Uno

Styra servon via Bluetooth (RN-42) och LabVIEW

Styra servon med Arduino och RC mottagare/Transmiter

Styra servon över Internet via Arduino med Teleduino

Styra servon ordentligt med en Raspberry Pi

Kontroll av servon med WF32

Arduino Nano och Visuino: kontrollera servon med Joystick

Arduino: Styr Servo med knappar

Xbox 360 Wireless + Arduino

Hur du använder Bluetooth med din Propeller

Raspberry Pi $ sudo apt-get update<br> $ sudo apt-get install alsa-utils<br> $ sudo modprobe snd_bcm2835<br> $ sudo aplay /usr/share/sounds/alsa/Front_Center.wav mångsysslare.

Cookie Monster - en talande robot integrerat med Slack
Johnny fem, en automatiserad torn

PA-Drink-O: Pachinko Bar Bot

Ställa in Zybot - kontrollern

Arduino kontrollerade animatronic trä huvud (läslampa)

Web kontrollerade multifunktionella RoboT
Trä Track System
