Untethered taligenkänning och syntes med MOVI med Rasberry PI (5 / 6 steg)
Steg 5: Programmering MOVI

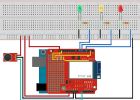
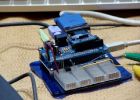
Så för faktiskt programmering MOVI och bygga strömbrytare exemplet som visas i videon, låt oss använda Python. Följande Python kod visar hur du använder det seriella gränssnittet och GPIO biblioteket för att genomföra de en röst-baserade strömbrytare, identiska till exempel Arduino skiss.
Kopiera och klistra in följande kod i en editor och leka med det:
# LightSwitch.py
# LightSwitch exempel liknande till exempel Arduino skiss
# https://github.com/audeme/MOVIArduinoAPI/blob/master/examples/beginner/LightSwitch/LightSwitch.ino
# Import: Rasberry PI GPIO (för LED), seriell, tid
importera RPi.GPIO som GPIO
importera följetong
Importera tid
# Initiera serial line
ser = följetong. Serial ("/ dev/ttyAMA0")
ser.BaudRate = 9600
# Ändra denna metod för att bli mer intelligent.
# Just nu, bara söker efter meningen ett och två.
def process(line):
skriva ut # Debug linjeutgång
om "#0" i raden: # meningen 1
GPIO.output (18, GPIO. HÖG)
ser.write ("säga.. .och det var ljus! \n")
om "#1" i raden: # meningen 2
GPIO.output (18, GPIO. LÅG)
def main ():
# Initiera GPIO för LED
GPIO.setmode (GPIO. BCM)
GPIO.setup (18, GPIO. OUT)
# Initiera MOVI
ser.write("INIT\n") # INIT
### Följande kommandon utförs endast av MOVI om det behövs
ser.write ("CALLSIGN rasberrypie\n") # Set callsign till rasberrypi
ser.write("NEWSENTENCES\n") # tåg MOVI
ser.write ("ADDSENTENCE Varde light\n") # meningen 1
ser.write ("ADDSENTENCE gå dark\n") # meningen 2
ser.write ("TRAINSENTENCES \n") # gå tåg, om det behövs
### Slutet lata
ser.write ("säger Mohvee på Rasberry Pi \n") # säga vi är redo.
data = "" # lagrar en rad med data från MOVI
medan (sant): #loop enlessly som loop() på Arduino
om (ser.inWaiting() > 0): #if det är grejer på den seriella porten
serchar=ser.Read() # läsa den
om (serchar == "\n"): # om en linje var slut
process(data) # bearbeta den
data = "" # gör en ny rad
annat: # annars
data = data + serchar; # rättvis tillägga
Time.Delay(0.1) # inte upptagen spin
ser.Close() # kommer aldrig att uppnås
# Se: http://www.artima.com/weblogs/viewpost.jsp?thread=4829
om __name__ == "__main__":
Main)

Untethered taligenkänning och syntes med Arduino

Taligenkänning och syntes med Arduino
Trådlös Audio Streaming och taligenkänning med Arduino

Taligenkänning med Arduino och BitVoicer Server

Röst till Arduino: Kontroll lysdioder med hjälp av taligenkänning MIT

Röst kontroll Arduino med taligenkänning i Windows 7 är

Arduino röst / taligenkänning med Geeetech modul [Tutorial]
Lösa en enkel krets diagrammet med en enda spänning och motstånd i serie och parallell

Taligenkänning med Arduino

Att utforska solid syntes med Circuitscribe ledande bläck krets Kit

En svävar sfär roterar lyser och blinkar med Arduino

Signalera syntes med Intel Edison

Triple nätaggregat och laddare med Digital skärm

Driva ditt hem och workshop med steam

FLING-AMA-STRING ultimata uppgraderingen: MOTION SENSOR & TIMER har katt tur det ON och OFF med hjälp av växelström (nr batterier) med nr människors INPUT
Bygga en Retro synt med Mini fickdatorer

Ek-och dalbana med personlig bild (Laser Cut)

Rakshak en: en rover för datainsamling och övervakning med drag av dataloggning, röst varningar och distansera mätningen.
