Vända huvuden med en animerad drivrutin i din Vintage Tamiya (7 / 7 steg)
Steg 7: Det här är allt så bakåt

Som jag nämnde i det sista steget, det finns en chans att din servo kommer vända åt fel håll när det gäller dina hjul, om du vill ändra servo för att åtgärda, detta är hur.
TL, DR version
- Swap yttre leder på potentiometer
- Swap leder på motor
Jag vill förstå version
Först lite mycket hög nivå av teorin om hur servon fungerar, du kan känna dig fri att ignorera detta om du vill, ändringen är mycket enkel, även om du inte vill veta hur det fungerar.
Styrsignal
Servo får en signal från din mottagare, som berättar vilken vinkel det ska inställd på utgående axel.
Motor riktning
Servo har en motor som driver redskap medurs eller moturs, riktning visar det är beroende på polariteten av spänning till motorn.
Läge Sensing
Servo upptäcker vilken ståndpunkt den utgående axeln är på med hjälp av en potentiometer (en roterande variabel resistor).
Återkoppling
Servo är kontinuerligt kontrollera output position (via potentiometer) med önskade position det fick från mottagaren, och gäller antingen positiva eller negativa spänning för motorn, att få det till rätt ställe.
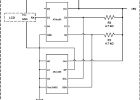
Backning Servo
För att vända den riktning som en servo vänder vi egentligen bara byta "minsta" och "maximal" ståndpunkt, som lätt uppnås genom att byta yttre leder på potentiometern. Emellertid bryter detta kontroll logik. När servo försöker korrigera en skillnad det kommer faktiskt att gälla motsatt polaritet motorn, att göra situationen värre. Lätt fix är att byta polariteten av leder på motorn också.

Tända ljus med nudlar

ReWire gamla Nokia handsfree (WH-102 & WH-205) att använda det med Android-telefoner (OMTP till CTIA omkoppling)

Konvertera en toy piano för att arbeta som en MIDI-enhet och använda den med Synthesia

Modell själv med en 3d-modell (kanske din familj också)

Spåra din position utan att använda GPS (med LAC och CID)

Rädda en NOKIA 3310 LCD och använda den med Arduino

Tid-av-använda luftkonditionering med en styrenhet för Vera Smart Home

Joule tjuv - använda lysdioder med endast ett AA-batteri!
Använda PmodCON3 med chipKIT produkter
Använda ATtiny85 med I2C EEPROM

Wearable vända indikatorer med Makey Makey

Använda Arduino med TIP120 transistor till kontroll motorer och hög effekt enheter

Om jag kunde vara något - använda Paint med berättelsen handstil

Konvertera din POP/dryck maskin att använda RFID med Arduino

Brunbrända seashell med inbyggd flasher.
Klistra in papier mache marionett huvuden med DIY ekologiskt mjöl. Marionnettes ecologiques. Titeres ecológicos

Hur man kontrollerar nästan vad som helst med en 3D-kamera (inklusive din Arduino)
Kompilera om (Rename) och Flash HIDUINO med ISP att förvandla din Arduino till en HID (usb-midi) enhet
