XY-Plotter (7 / 9 steg)
Steg 7: elektronik

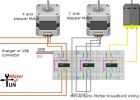
Elektroniken är ganska okomplicerad.
Placera de två ULN2003A motor förarna i en skärbräda.
Den digitala utgången kan komma från någon av PWM stift på Arduino. Detta kan anges i programmet på nästa steg.
Varje motor kräver 4 stift på arduino (ring dem pins A-D, beroende på vilken PWM stift du valde), en för varje stepper motor spole/fas.
Fäst Pins A-D från arduino stift 1-4 på ULN2003.
Marken förarens stift 8 och bifoga 2.5V (hög strömtillförsel) till pin 9.
Bifoga färgade stepper trådarna till föraren chip i följande ordning:
PIN 16: Orange
PIN 15: svart
Stift 14: röd
Stift 13: gul
Stift 9: vit
Stepper Motor datablad och ULN2003 pinut bifogas.
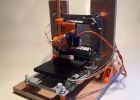
För att generera videon, fästes motors Arduino använder Easy Driver Stepper Motor Driver. Koden som används för att flytta den skrivhuvudet fram och tillbaka ges nedan:
int stepPin = 2; void setup() { pinMode (2, utgång); digitalWrite (stepPin, högt); void loop() { digitalWrite (dirPin, hög); digitalWrite (dirPin, låg);
int dirPin = 3;
int LEDpin = 13.
int ii = 0;
pinMode (3, OUTPUT);
pinMode(13,OUTPUT);
digitalWrite (dirPin, hög);
}
för (ii = 0; ii < 2000; ii ++) {
Delay(5);
digitalWrite (LEDpin, låg);
digitalWrite (stepPin, låg);
Delay(5);
digitalWrite (LEDpin, hög);
digitalWrite (stepPin, högt);
}
för (ii = 0; ii < 2000; ii ++) {
Delay(5);
digitalWrite (LEDpin, låg);
digitalWrite (stepPin, låg);
Delay(5);
digitalWrite (LEDpin, hög);
digitalWrite (stepPin, högt);
}
}

Hemgjord gravyr Plotter Laser ram DIY Y axeln bild linjära
Hemgjord gravyr Plotter Laser Frame DIYX axel bild linjär CNC material
Hemgjord Laser 3D-skrivare gravyr Plotter ram DIY X Axis Skjut linjär CNC
Hemgjord Mini Laser gravyr Plotter ram DIY X Slde CNC styrda
Hemgjord Mini lasergravering Plotter ram av aluminiumlegering
Hemgjord X Y Z axel bild för DIY RepRap Prusa 3D skrivare gravyr Plotter Laser ram

Mini CNC Plotter
Mini arduino Plotter utan en servomotor
Mini Traceur Arduino - Mini CNC Plotter

Intellekten Galileo kontrollerade cnc plotter
Hemgjord RepRap Prusa 3D skrivare gravyr Plotter Laser ram DIY Y axeln bild linjära
Hemgjord RepRap Prusa 3D-skrivare Laser Plotter ram DIY Mini PCB Miling Router Mill Aluminium
Hemgjord RepRap Prusa 3D-skrivare lasergravering Plotter ram DIY X Z axel bild linjära
Hemgjord RepRap Prusa 3D-skrivare gravyr Plotter Laser ram DIY X Y Z axel bild linjära
Mariposa de vinilo con la plotter de corte

Gör en vikning Plotter som skriver ut kretsar på textilier

Adruino följetong Plotter
Hemgjord Mini lasergravering Plotter ram med DIY X Y axeln linjär bild CNC
Hemgjord X Y Z axel bild för DIY hemgjord RepRap Prusa 3D skrivare gravyr Plotter Laser ram